




























11-189
11-189
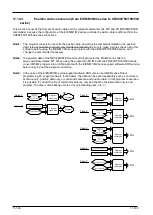
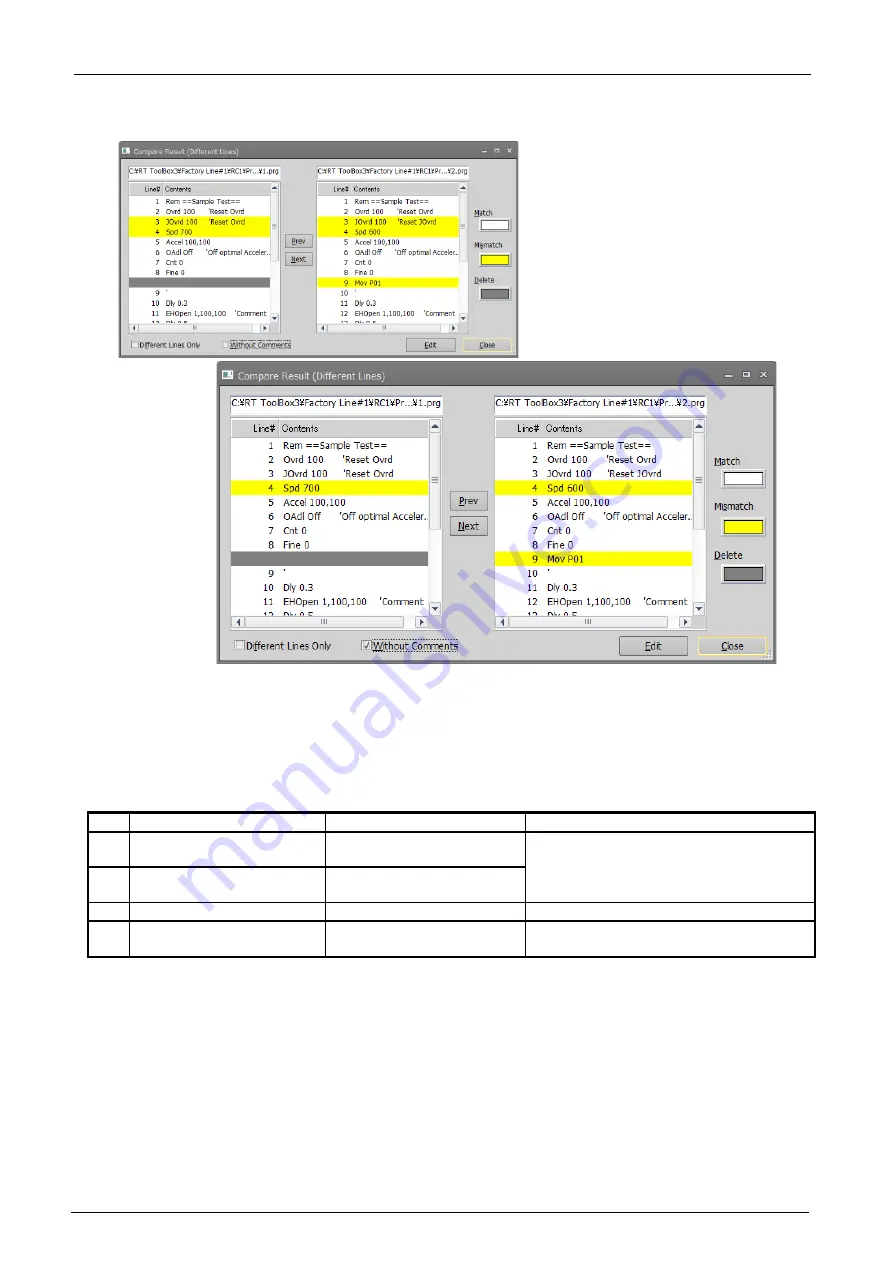
By the [Without comments] checkbox, you can select to exclude or include comments in the compare result.
Figure 11-94 Compare Results (With Comments Excluded)
11.14. Program Conversion
Existing offline robot programs created in a different program language can be converted to the currently set
program language.
Table 11-7 Combination list of program conversion
No.
Source
Target
Content
1
MELFA-BASIC III
MELFA-BASIC IV
The position data is converted.
If “MELFA-BASIC V” is chosen for the
target, the lines No. are also converted in
addition to this conversion.
2
MELFA-BASIC III
MELFA-BASIC V
3
MELFA-BASIC IV
MELFA-BASIC V/VI
The lines No. are converted.
4
MOVEMASTER command
(CR-116/356)
MOVEMASTER command
The position data is converted.
There are the following two types of conversion.
For details, see
"11.14.2 Converting line Nos. (from MELFA-BASIC IV to MELFA-BASIC V or VI)", "11.14.3
Position data conversion (from E/EN/M1/M2 series to CR800/750/700/500 series)"
.
(1) Conversion of the line Nos.
Converts the line Nos. and relevant command line, because the handling of line Nos. in MELFA-BASIC
IV is different from MELFA-BASIC V/VI.
(2) Conversion of the position data
Converts the format of position data and relevant commands, because the configuration of the
E/EN/M1/M2 E/EN/M1/M2 series controller’s position data is different from the CR800/750/700/500
series controller’s.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































