





























11-119
11-119
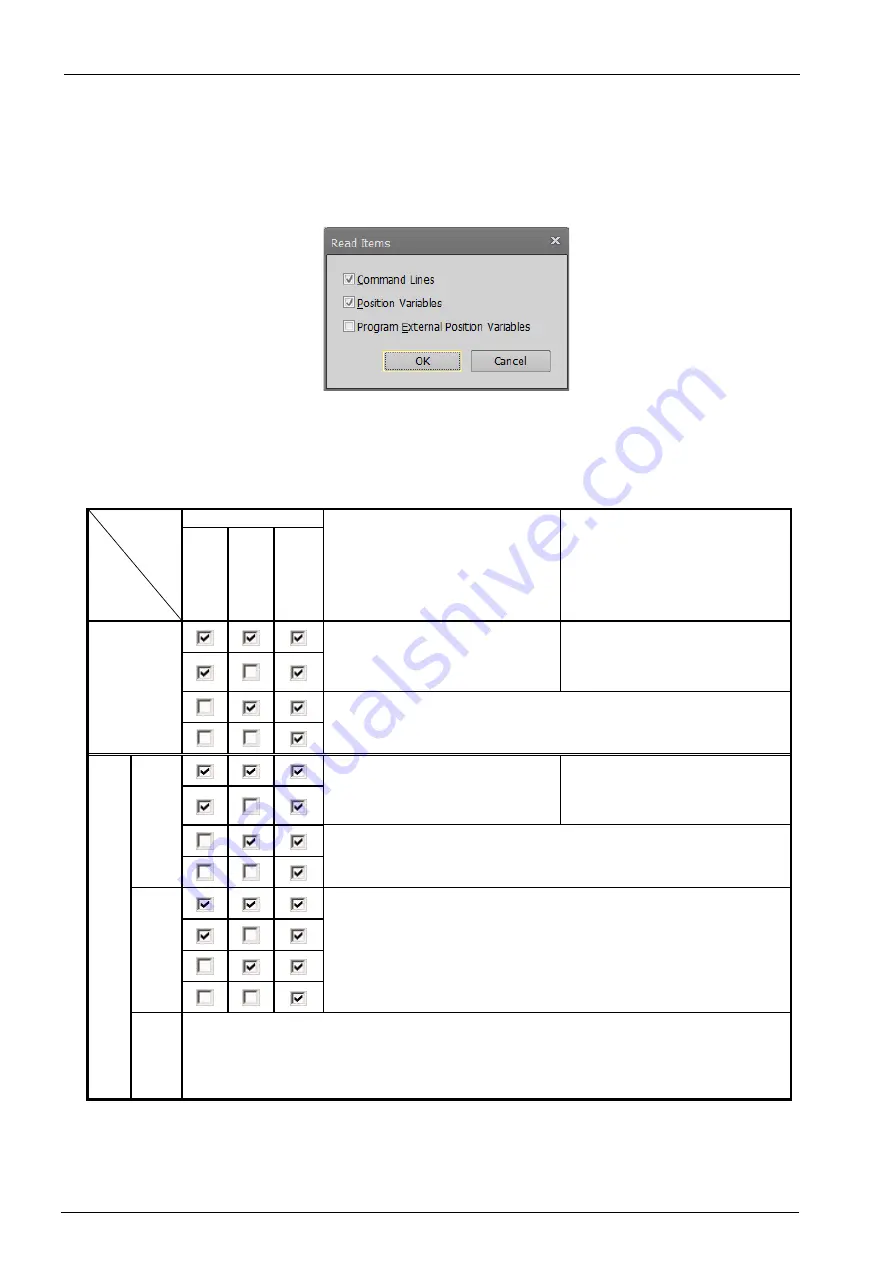
11.2.3. Read Items when opening program in robot controller
You can set the robot program read items divided into command lines, position variables, and program external
position variables. This function is displayed after H1 edition on CRn-500 series controller.
The default values of read items are as follows.
Figure 11-6 Read Items
The program external position variable read operations are shown in
Program External Position
Variable Read Operations".
(For details on program external position variables, see
"Detailed explanations of
functions and operations"
in the robot controller's user's manual.)
Table 11-1 Program External Position Variable Read Operations
Read Item
Position variable, joint variable
(P_01, J_02, etc.)
(MOVEMASTER command :
901-999)
Position array variable,
joint array variable
(P_100( ), J_102( ), etc.)
C
om
m
and
P
o
s
it
io
n
Ex
te
rn
a
l
p
o
s
it
io
n
v
ar
iabl
e
CR800/
CR750/700
series robot
controllers
Reads only the external position
variables (position variables, joint
variables) used in instruction
statements. (*1)
Reads all elements used in
instruction statements. (*2)
Reads all external position variables (position variables, joint
variables, position array variables, joint array variables).
C
R
n
-5
00
s
er
ies
r
o
bot
c
o
nt
rol
ler
s
of
tw
a
re
v
er
s
ion
Ve
r.
J
1
o
r
la
te
r
Reads only the external position
variables (position variables, joint
variables) used in instruction
statements. (*1)
Reads all elements used in
instruction statements. (*2)
Reads all external position variables (position variables, joint
variables, position array variables, joint array variables).
Ve
r.
H
1
t
o
H
7
Reads all external position variables (position variables, joint
variables, position array variables, joint array variables).
V
er
.G
9
o
r
e
a
rl
ie
r
This screen is not displayed.
*1: When Movemaster commands are used, all external position variables are read.
*2:
When only P_100 (1) is used in the command statement, P_100 (1) to P_100 (10) are all read. However, the number of
valid elements depends on the robot controller software version used.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...