






Step 11.
Connect the 6vdc battery pack to the battery
harness to power the servos. Flip the switch to
turn the servo power on.
The LEDs should
NOT switch on this time. If they do,
immediately power off your robot and
double check your connections.
Note, our battery packs do NOT come charged.
You will need to charge your battery before
proceeding to the next tutorial.
Figure 10.
Step 12.
Mount the SSC-32 onto the four hex spacers
used in step 3. Use four 4-40 x 1" hex spacers
to attach the long aluminum spacers to the
underside of the top body plate. The figure
does not show the wiring for clarity.
4 x
Figure 12. Mount the SSC-32
(wires etc. removed for clarity)
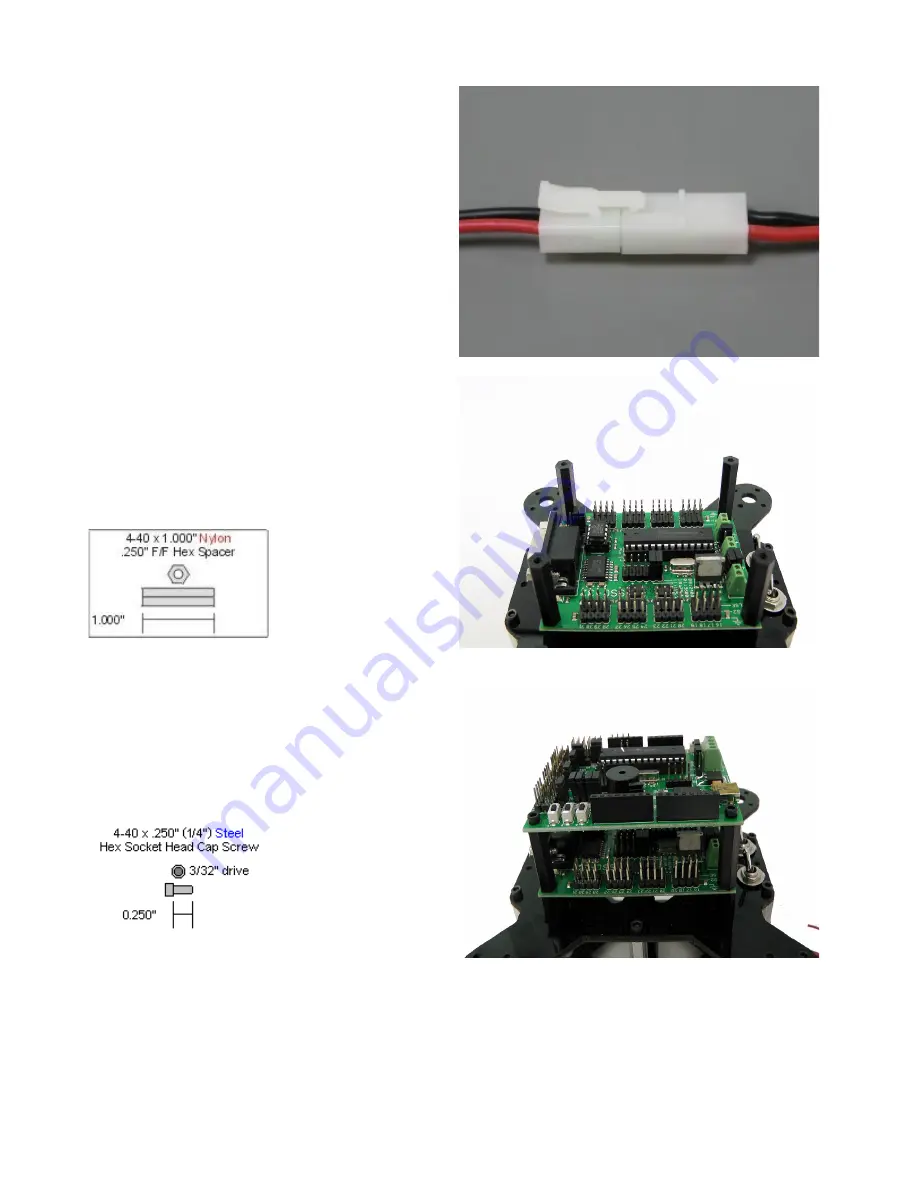
Step 13.
Use four 4-40 x 1/4" hex socket screws to
mount the BotBoarduino to the hex spacers in
the orientation shown, on top of the SSC-32.
The figure does not show the wiring for clarity.
4 x
Figure 13. Mount the BotBoarduino
(wires removed for clarity)