




















26
5.Gesture control
In this episode, we will continue to use obstacle avoidance sensors to
achieve new gameplay!
Software Command
Script Type Command
Comment
Robots
Gets the status of the No.1
obstacle avoidance sensor
Robots
Gets the status of the No.2
obstacle avoidance sensor
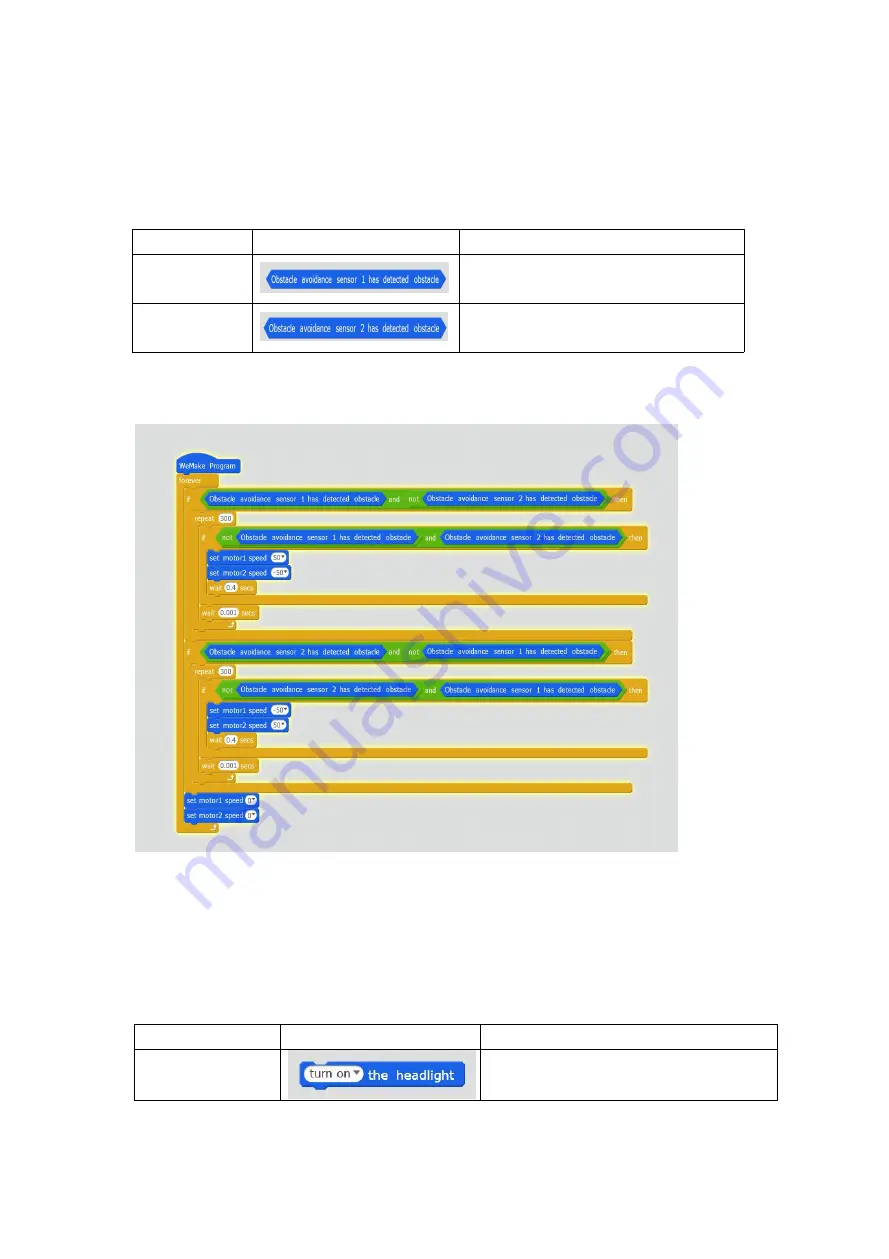
Creat a target:
Using 2 obstacle avoidance sensors at the top of the
Qbot to determine the direction of movement of the object ahead, so as to
make a left or right turn
6.illuminate the night
LED hardware principle:
There are two large LED lights with 1cm
diameter on the Qbot. We can control the situation of lights(off/ on) by
programming
Software Command:
Script Type
Command
Comment
Robots
Turn on or off the Headlight.
Create a target:
Qbot travels along the black track which has been
marked . When traveling to the designated section, 2 LED lights of Qbot
Summary of Contents for Qbot
Page 1: ...1 Qbot Robot Car Kit User Manual...
Page 6: ...6 Flat Cable 1 Charger 1...
Page 7: ...7 Assembly Assembly steps Step 1 We can fix 3 copper pillars onto control board...
Page 14: ...14 Open the driver installation interface Waiting for installation...
Page 17: ...17 Then click the Upload to Ardunio...
Page 18: ...18 When it appears Upload finish you can start controlling your Qbot with moile phone...
Page 21: ...21 If the connection fails restart the APP and reconnect several times...
Page 31: ...31 obstacle based on the time it takes to send and receive the ultrasonic wave...





































































