





























9
Diagnostics & error management
9.7
Maloperation of the drive
644
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.7
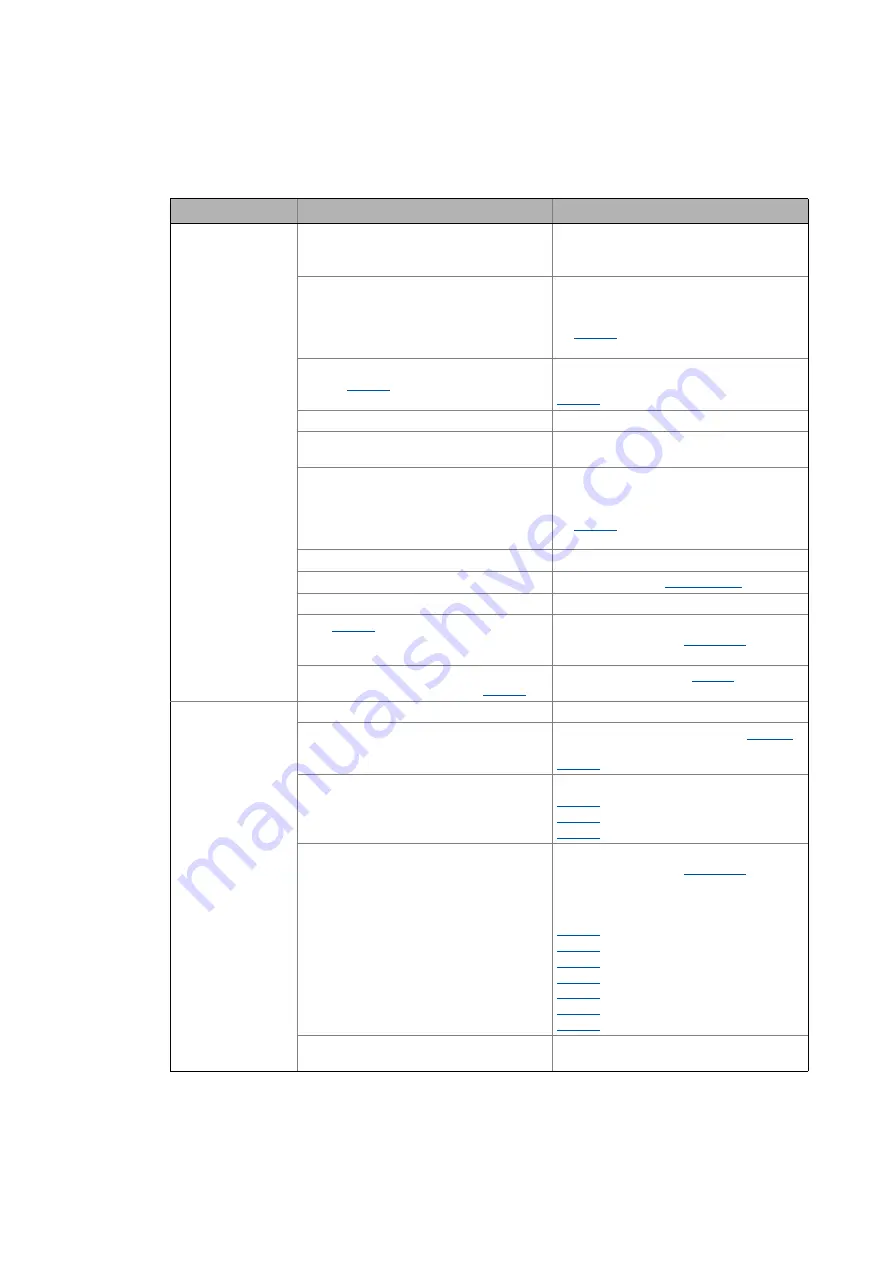
Maloperation of the drive
Maloperation
Cause
Remedy
Motor does not
rotate
DC-bus voltage is too low
• Red LED is blinking every 1 s
• Display in the keypad:
LU
Check mains voltage
Inverter is inhibited
• Green LED is blinking
• Display in the keypad:
Deactivate controller inhibit
• Note: Controller inhibit can be set via
several sources !
•
displays all active sources for
controller inhibit.
Automatic start is inhibited
(Bit 0 in
LOW/HIGH edge at RFR
If required, correct starting condition with
DC-injection braking (DCB) is active
Deactivate DC injection brake
Mechanical motor brake is not released
Release mechanical motor brake manually or
electrically
Quick stop (QSP) is active
• Display in the keypad:
Deactivate quick stop
• Note: Quick stop can be set via several
sources!
•
displays all active sources for
quick stop.
Setpoint = 0
Select setpoint
JOG frequency = 0 at activated JOG setpoint Set JOG setpoint in
Trouble active
Clear fault
= 4, "SLVC: Vector control" has
been set, but no motor parameter
identification has been carried out.
Execute automatic motor parameter
identification with the
device
command
Assignment of several mutually exclusive
functions with a signal source in
Correct configuration in
Motor rotates
irregularly
Motor cable is defective
Check motor cable
Maximum motor current in motor or
generator mode is set too low
Adjust settings to the application:
Imax in motor mode
: Imax in generator mode
Motor is underexcited or overexcited
Check parameterisation:
: Motor control
: VFC: V/f base frequency
: VFC: Vmin boost
Rated motor data (stator resistance, speed,
current, frequency, voltage) and cos
ϕ
and/or magnetising inductance is not
adapted to the motor data
Execute automatic motor parameter
identification with the
device
command
- or -
Adjust motor parameters manually:
: Motor stator resistance
: Rated motor speed
: Rated motor current
: Rated motor frequency
: Rated motor voltage
: Motor cosine phi
: Motor magnetising inductance
Motor windings are wired incorrectly
Reverse from star connection to delta
connection