










-2-
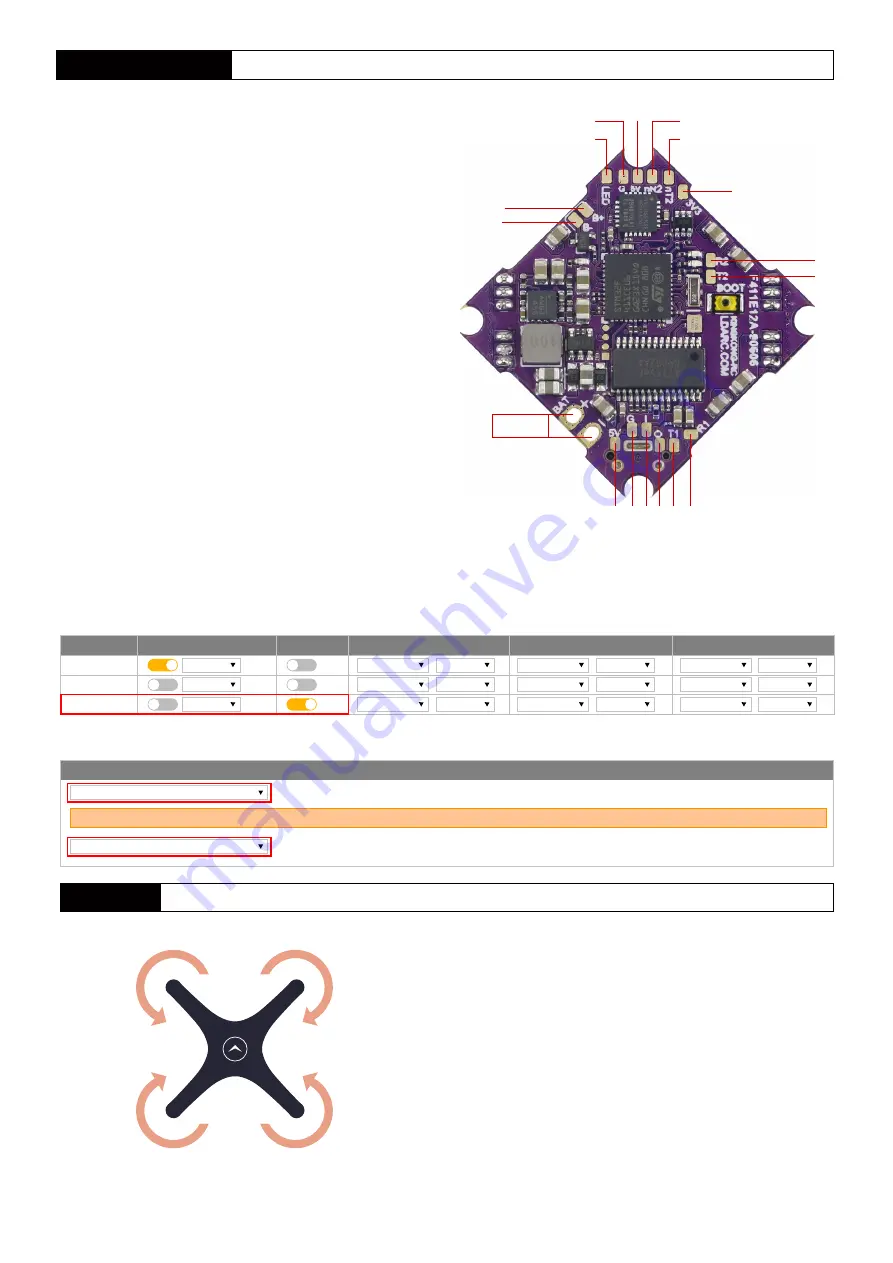
M4(CW)
M2(CCW)
M3(CCW)
Pay attention to the direction of rotation of the motor when installing the prop
M1(CW)
Motor
UART setting
Receiver setting
Identifier
USB VCP
UART1
UART2
Configuration/MSP
115200
Serial RX
Telemetry Output
Disabled
AUTO
Sensor Input
Peripherals
Disabled
AUTO
Disabled
AUTO
Disabled
AUTO
Disabled
AUTO
Disabled
AUTO
Disabled
AUTO
AUTO
Disabled
Disabled
AUTO
115200
115200
Receiver
Serial-based receiver(SPEKSAT
Receiver Mode
SBUS
Serial Receiver Provider
Note : Remember to configure a serial Port(via Ports tab) and choose a Serial Receiver Provider when using RX_SERIAL feature
LED
G
5V
+5V
GND Video in Video out TX1 IR
C T
ramp
RX1
2-4S
Invert RX2
Invert TX2
3V3
Buzzer-
R2
T2
F411E12A
parameters
<1> STM32F411 MCU,Operation at 100Mhz,firmware target MATEKF411.
<2> MPU-6000 six-axis SPI sensor.
<3> Low power version AT7456E,support Betaflight OSD.
<4> BEC use MP9943 High-Efficiency Synchronous mode DC-DC,
support [email protected] output.
<5> TX1 and RX1 pads,can support IRC-Tramp or Camera control.
<6> UART2 have 4 pads, TX2, RX2, invert TX2, invert RX2, support
all type receiver, like S.BUS, DSM, iBUS, F.Port, crossfire etc.
<7> TX2 and RX2 pads,RX2 support NOT invert receiver,for example
DSM or iBUS.
<8> Invert TX2 and invert RX2 pads,invert RX2 support invert receiver
like S.BUS,and PPM receiver also need connect to invert RX2 pad.
<9> Support buzzer and LED strip.
<10> Onboard current sensor,current scale value 210.
<11> BLheli_S four in one ESC,target is G-H-30.
<12> ESC maximum current 12A each way,support 2S~4S lipo battery,
if use 2S battery please make sure voltage not lower than 6.8V
when ESC in heavy load.
Summary of Contents for ET85D PNP
Page 9: ... 9 6 PID Setting ...
Page 10: ... 10 7 Mode setting ...































































