


















Daqu — Manual
5.1
Rotax iS
Standard Daqu has much more channels, but it does not have an ECU con-
nection. For this reason, a modified version of standard Daqu was developed,
which allows connection to ECU’s with a CAN bus (Rotax iS, for example).
Modifications include removing manifold pressure sensor and installing an
additional connector. This connector is used to connect to ECU CAN bus.
In most cases, this is a Rotax iS engine.
5.1
Rotax iS
This section refers to Rotax 912 iS and Rotax 915 iS engines. The connection
principles are identical for both engines.
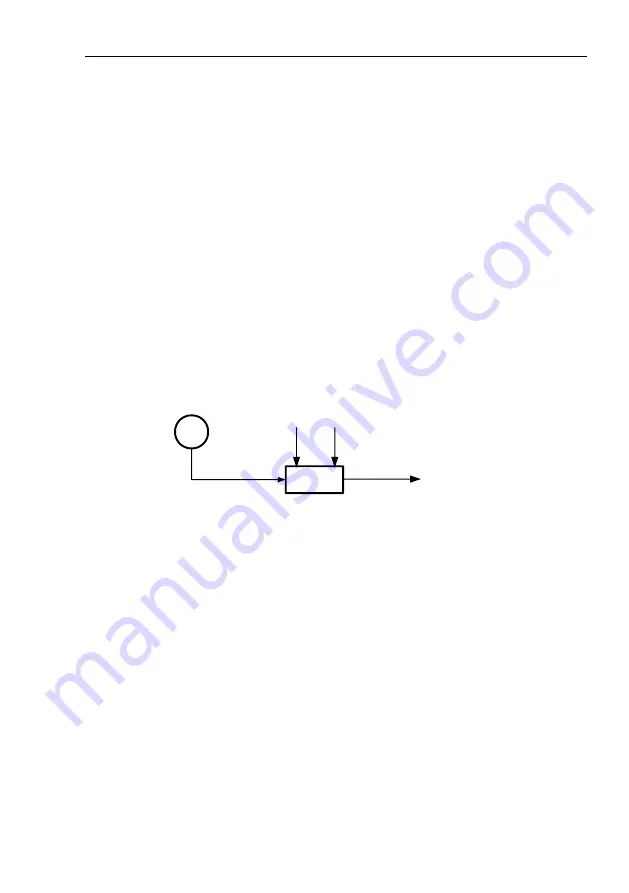
The Rotax iS engine comes with a complete set of sensors. ECU unit on the
engine reads the sensors and transmits the information on the outgoing CAN
bus using CANaerospace protocol. Daqu reads this CAN bus and retransmits
the same information using Kanardia protocol on a different CAN bus. See
Figure 25.
ECU
DAQU
CAN
CANaerospace
CAN
Kanardia
Nesis, Emsis,
Digi, etc.
R
ot
or
Ta
nk
Additional sensors
Figure 25:
Illustration of the connection principle.
Almost all information
comes from the ECU. Rotor RPM and fuel tanks and other addi-
tional sensors can be still connected directly to Daqu.
Rotax iS ECU unit transmits the following information: engine RPM, fuel flow
rate, manifold pressure, oil pressure, oil temperature, coolant temperature,
EGT 1–4, manifold air temperature, engine ambient temperature, throttle
position, engine ambient pressure, ECU bus voltage, engine status, engine
hours, ECU hours, sensors status.
Additonal sensors like, fuel pressure, rotor RPM, fuel level, various trims,
additional voltages, . . . are connected directly do Daqu to supplement the
ECU information.
5.1.1
Connection
The iS engine has two CAN bus lanes: lane A and lane B. To get complete
data from the ECU you have to connect both lanes as in Figure 26. Both lanes
47
©
Kanardia
2019







































































