





























25
5.3
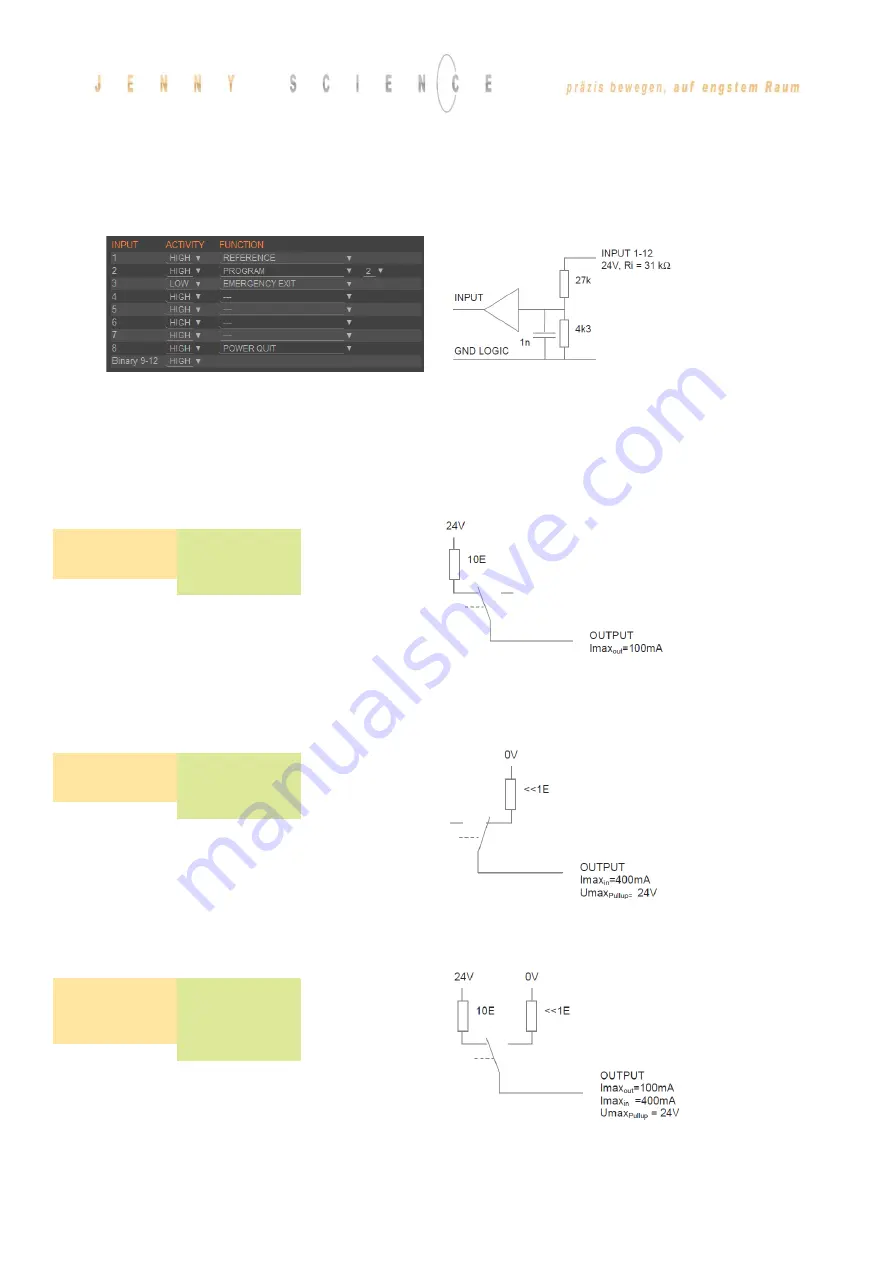
Internal I/O Circuit
INPUT 1-12
OUTPUT 1-8
TYPE SOURCE
SOT
Bit-value
TYPE
SOA
Bit-value
ACTIVITY
Output
ON
Output
OFF
0,1
SOURCE
1
HIGH
24V*
open*
0
LOW
open
24V
All Output SOURCE
SOT 21845
SOA 255 / 0
TYPE SINK
SOT
Bit-value
TYPE
SOA
Bit-value
ACTIVITY
Output
ON
Output
OFF
0,0
SINK
1
HIGH
open
0V
0
LOW
0V
open
All Output SINK
SOT 0
SOA 255 / 0
TYPE SOURCE/SINK
SOT
Bit-value
TYPE
SOA
Bit-value
ACTIVITY
Output
ON
Output
OFF
1,0
SINK /
SOURCE
1
HIGH
24V
0V
0
LOW
0V
24V
All Output SOURCE/SINK
SOT 43690
SOA 255 / 0
HIGH or LOW ACTIVITY programmable







































































