





























Optidrive E3 Advanced Technical Manual Issue 05.Docx
16 / 69
2
. Opt
id
rive
E3
Par
amet
er
Set Ov
er
vi
ew
2.6
Control Terminal Connections
For standard applications and operation, the basic control of the drive and functions of all drive input terminals can be configured using just
two parameters, P-12 and P-15. P-12 is used to define the source of all control commands and the primary speed reference source. P-15 then
allows fast selection of Analog and Digital Input functions based on a selection table.
2.6.1
P-12 Function
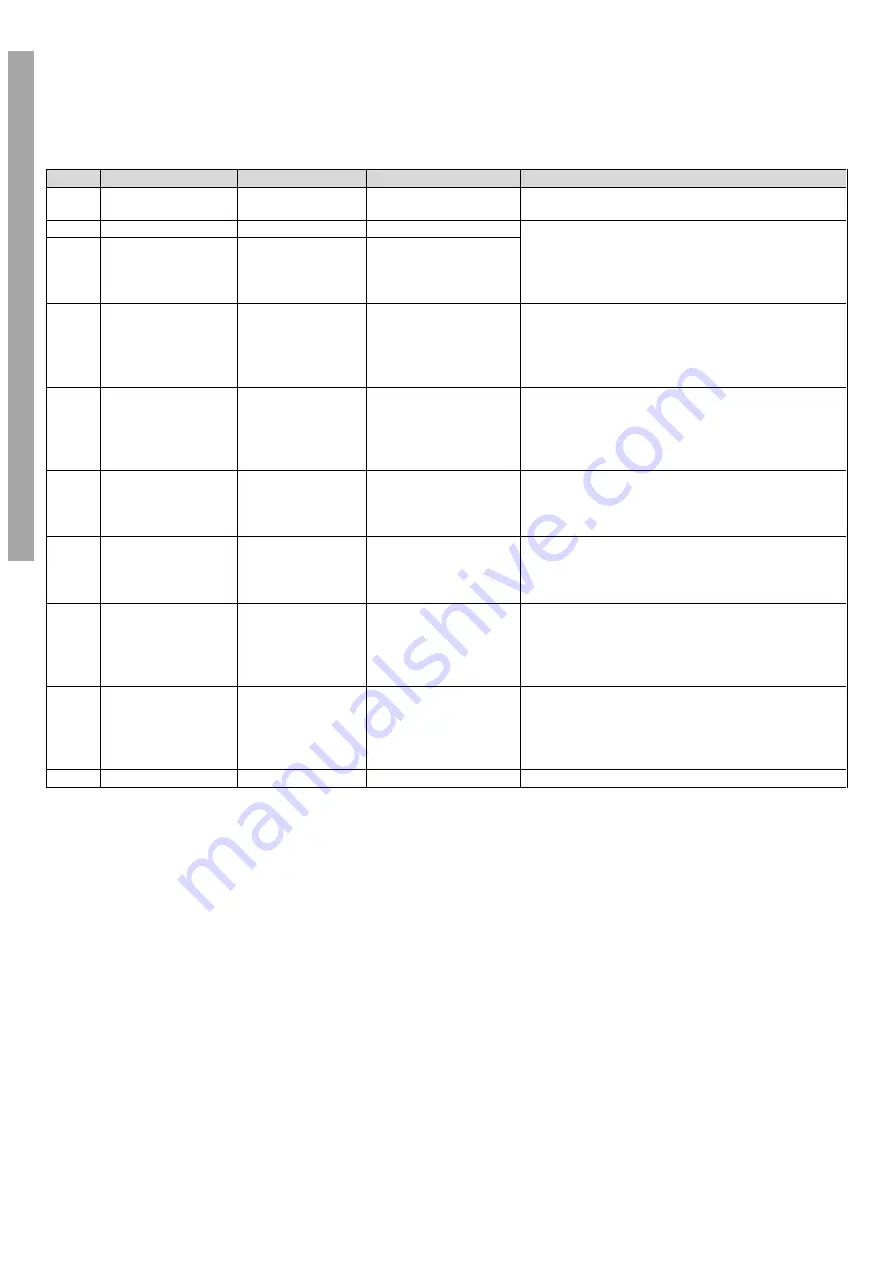
P-12 is used to select the main control source of the drive and the main speed reference according to the following table
P-12
Function
Control Source
Main Speed Reference
Notes
0
Terminal Control
Terminals
Analog Input 1
All control signals are applied to the control terminals.
Functions are determined by P-15 Macro setting.
1
Keypad Control
Keypad / Terminals
Motorised Pot / Keypad
When keypad mode is selected, the default operation of
the drive requires the keypad Start & Stop buttons are
used to control the drive. This can be changed using P-
31 to allow the drive to be started from Digital Input 1
directly.
2
Keypad Control
Keypad / Terminals
Motorised Pot / Keypad
3
Modbus RTU
Modbus RTU
Modbus RTU
Control of the drive operation is through the Modbus
RTU Interface.
Acceleration and Deceleration Rates are controlled by P-
03 and P-04 respectively.
Digital Input 1 must be closed to allow operation.
4
Modbus RTU
Modbus RTU
Modbus RTU
Control of the drive operation is through the Modbus
RTU Interface.
Acceleration and Deceleration Rates are also controlled
by Modbus, P-03 and P-04 are disabled.
Digital Input 1 must be closed to allow operation.
5
PI Control
Terminals
PI Output
Enable / Disable control of the drive is through the drive
control terminal strip.
Output frequency is set by the output of the PI
Controller
6
PI Control with
Analog Summation
Terminals
PI Output Added to AI1
Enable / Disable control of the drive is through the drive
control terminal strip.
Output frequency is set by the output of the PI
Controller, added to the value of analog input 1.
7
CAN Open
CAN Open
CAN
Control of the drive operation is through the CAN Open
Interface.
Acceleration and Deceleration Rates are controlled by P-
03 and P-04 respectively.
Digital Input 1 must be closed to allow operation.
8
CAN Open
CAN Open
CAN
Control of the drive operation is through the CAN Open
Interface.
Acceleration and Deceleration Rates are also controlled
by Modbus, P-03 and P-04 are disabled.
Digital Input 1 must be closed to allow operation.
9
Slave Mode
Master Drive
From Master







































































