


























85
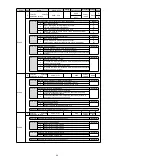
10.1.2 List of servo parameters
The parameter list is as follows.
(Note) The following parameters are factory settings and should not be changed.
• Appointment Parameters
• Parameters not recorded in this manual
Pn No.
Size
Name
Setting range
Setting
Unit
Factory setting Available
time
Categor
y
Rema
rks
Pn000
2 Function selection Basic
switch 0
0000
~
10B1
-
0000
Power
restart
Setup
-
n.
X
Rotation direction selection
Remarks
0
The CCW direction is the forward rotation direction.
1
The CW direction is the forward rotation direction. (Reverse mode)
n.
X
Control mode selection
Model
0
Speed control (analog command)
P
1
Position control (pulse sequence command)
2
Rotational moment control (analog command)
3
Internal set speed control (contact command)
4
Internal set speed control (contact command)
speed control (analog
command
5
Internal set speed control (contact command)
position control
(pulse sequence command)
6
Internal set speed control (contact command)
torque control
(analog command
7
Position control (pulse sequence command)
speed control (analog
command)
8
Position control (pulse sequence command)
torque control (analog
command)
9
Torque control (analog command)
speed control (analog command)
A
Speed control (analog command)
speed control with zero position
fixing function
B
Position control (pulse sequence command)
position control with
command pulse disable function
n.
X
Appointment parameters (do not change it)
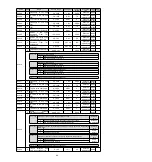
n.X
Startup selection when encoder is not connected
Remarks
0
It is started as the corresponding servo drive of the rotary servo motor
when the encoder is not connected.
1
It is started as the corresponding servo drive of the linear servo motor
when the encoder is not connected.
Pn001
2 Function
selection
application switch 1
0000
~
1142
-
0000
Power
restart
Setup
-
n.
X
Servo OFF and Stop Method in Gr.1 Alarm
Remarks
0
Stop the motor by DB (dynamic brake).
1
Stop the motor through DB, and then cancel DB.
2
Do not use DB, set the motor to run freely.
n.
X
Stop Method when it is overtravel (OT)
Remarks
0
DB stop or free running stop (stop method is the same as Pn001=
n.
X).
1
The set torque of Pn406 is used as the maximum torque to decelerate
and stop the motor, and then the servo lock state is entered.
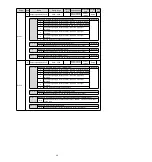
2
The set torque of Pn406 is taken as the maximum torque to decelerate
and stop the motor, and then enter the free running state.
3
According to the deceleration time of Pn30A, the motor decelerates
and stops, and then enters the servo locking state.
4
According to the deceleration time of Pn30A, the motor will decelerate
and stop, and then enter the free running state.
n.
X
Selection of AC/DC input for main loop power supply
Remarks
0
AC power is input from L1, L2, L3 and L3 terminals as the main loop
power (no universal converter is used).
1
Between B1/
⊕
,
⊖
the input DC power supply is as the main loop
power supply (using an external converter or a universal converter).
n.X
Appointment parameters (do not change it)







































































