






Pin 12
GND
Ardupilot Integration Guide
I2C
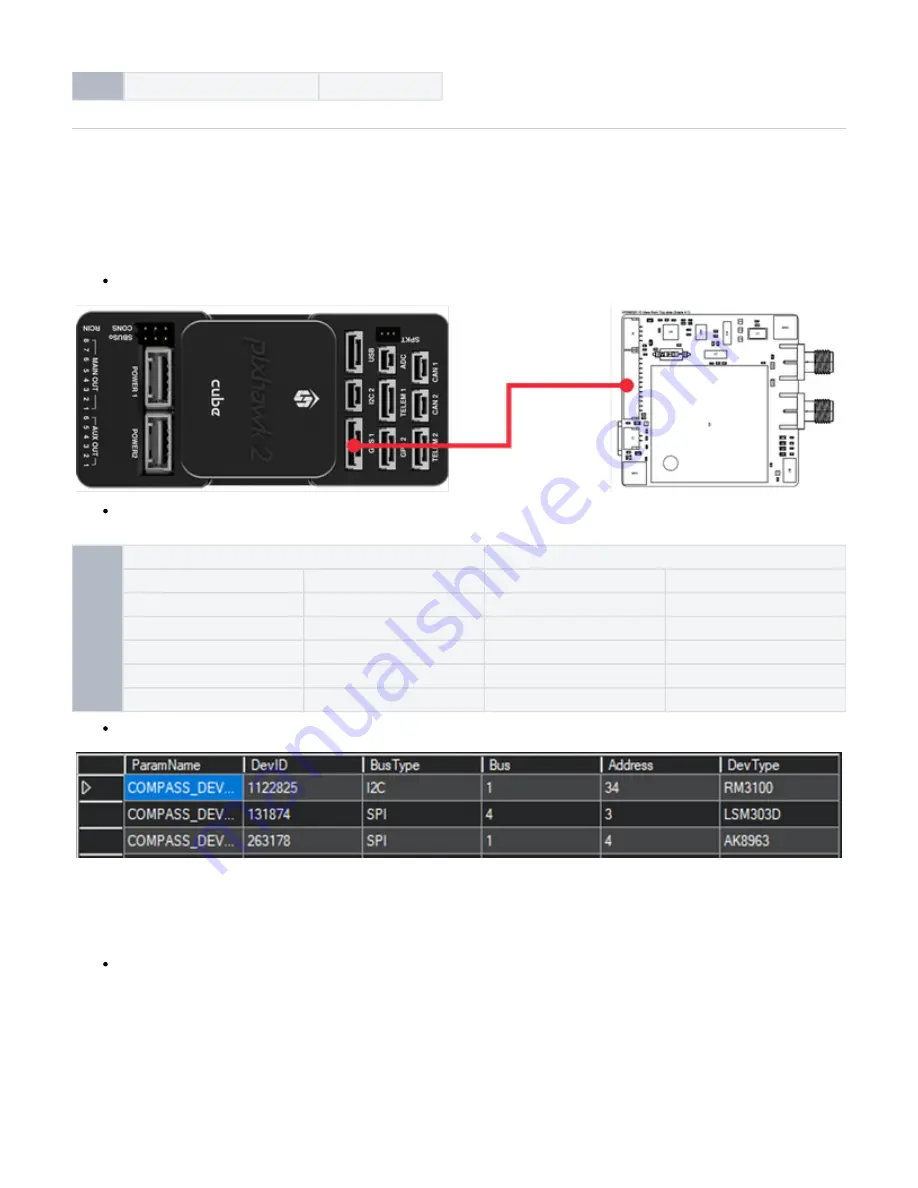
Connecting to the PositionPRO using the main connector uses a direct serial connection to the mosaic GNSS and an I2C connection for the
magnetometer and barometer peripherals.
Connect the main connector of the PositionPRO to the autopilot’s GPS1 or GPS2 connector using the provided JST-GH cables. Or make
your own wiring harness using the pinouts detailed previously.
Configure the following parameters to select the SBF GNSS driver and (optionally) enable the external MS5611 barometer. Reboot the
autopilot for the changes to take effect.
If Using GPS1
If Using GPS2
GPS_INJECT_TO
0
GPS_INJECT_TO
1
GPS_RATE_MS
100
GPS_RATE_MS2
100
GPS_TYPE
10
GPS_TYPE2
10
SERIAL3_BAUD
115
SERIAL4_BAUD
115
SERIAL3_PROTOCOL
5
SERIAL4_PROTOCOL
5
GND_PROBE_EXT
4
GND_PROBE_EXT
4
After rebooting, you can use the “HWID” menu in Mission Planner to verify that the external RM3100 compass is being detected.
Configure your compass priority parameters as desired.
DroneCAN
Connecting to the PositionPRO with CAN provides a clean wiring interface for GNSS, magnetometer, and barometer data. The AP_Periph
firmware manages CAN communications using the DroneCAN protocol.
Connect the CAN connector of the PositionPRO to the autopilot’s CAN1 or CAN2 connector using the provided JST-GH cables. Or make
your own wiring harness using the pinouts detailed previously.







































































