





























2-4 Examining operating conditions
82
1
2
3
4
5
6
7
8
9
10
11
付
S
e
le
c
tion gui
de
line
s
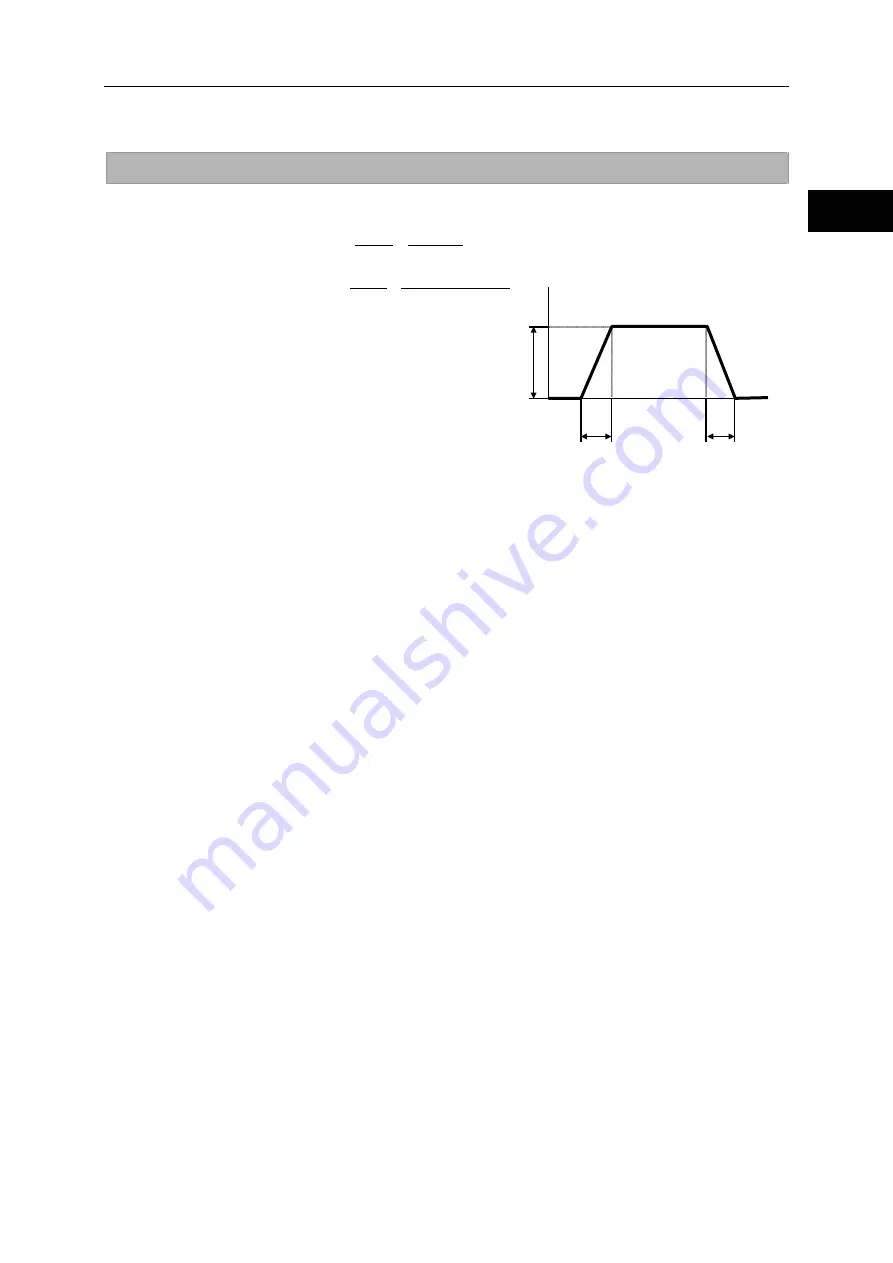
Acceleration and deceleration time
Calculate acceleration and deceleration times for the selected actuator.
Acceleration time:
Deceleration time:
t
a
: Acceleration time
(s)
t
d
: Deceleration time
(s)
k: Acceleration reduction coefficient 1 to 1.5
The total positioning time may become shorter
if the acceleration is lowered for the purpose
of reducing the settling time after positioning.
J
A
: Actuator inertia moment
(kg
・
m
2
)
J
L
: Load inertia moment
(kg
・
m
2
)
N: Actuator rotation speed
(r/min)
T
M
: Maximum actuator torque
(Nm)
T
F
: Actuator friction torque
(Nm)
T
F
=K
T
x I
R
-
T
R
K
T
: Torque constant
(Nm/A)
T
R
: Allowable continuous torque
(Nm)
I
R
: Allowable continuous current
(A)
T
L
: Load torque (Nm); The polarity is positive (+) when the torque is applied in the rotation direction, or
negative (-) when it is applied in the opposite direction.
Calculation example 1
Select an actuator that best suits the following operating conditions:
・
Rotation speed: 80 rpm
・
Load inertia moment: 1.5 kg
・
m
2
・
Since the load mechanism is mainly inertia, the load torque is negligibly small.
(1)
After applying these conditions to the graph in [2-1], SHA25A51SG-B09A200 is tentatively
selected.
(2)
From the rated table, the following values are obtained: J
A
= 0.56 kg
・
m
2
, T
M
= 127 Nm, T
R
=
41 Nm, K
T
= 19 Nm/A, I
R
= 3A.
(3)
Based on the above formula, the actuator's friction torque T
F
is calculated as 19 x 3 - 41 = 16
Nm.
(4)
If k = 1.3, the acceleration time and deceleration time can be obtained as follows from the
above formulas:
t
a
= 1.3 x (0.56+1.5) x 2 x
π
/60 x 80/127 = 0.177 s
t
d
= 1.3 x (0.56+1.5) x 2 x
π
/60 x 80/(127+2 x 16) = 0.141 s
(5)
If the calculated acceleration/deceleration times are too long, correct the situation by:
・
Reducing load inertia moment
・
Selecting an actuator with a larger frame size
ta
td
N
Time
Rotation speed
(
)
L
M
L
A
a
T
T
N
60
π
2
J
J
k
t
−
×
×
×
+
×
=
(
)
L
F
M
L
A
d
T
T
2
T
N
60
π
2
J
J
k
t
+
×
+
×
×
×
+
×
=







































































