
























Frankenrunner User Manual
Rev 1.0
5.5 Tuning the Sensorless Self Start
Advanced Setup
If you are running in sensorless mode, then you may need to tweak the
sensorless self start behaviour.
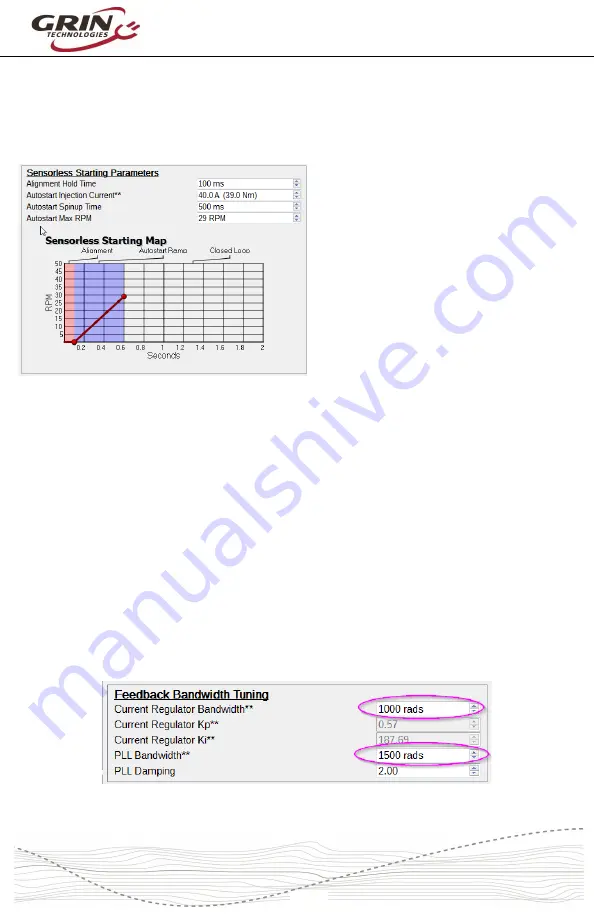
When a brushless motor is run
without Hall sensors and started from
a complete stop, the motor controller
attempts to ramp up the motor’s rpm
to a minimum speed so that it can
latch onto the rotation (closed loop).
It does this by first injecting a static
current into the phase windings to
orient the motor into a known
position. The controller then rotates
this field faster and faster until
reaching the “Autostart Max RPM”
value.
As initial values, set the “Autostart Injection Current” to half your maximum phase
current, an “Autostart Max RPM” between 5% to 10% of the running motor rpm,
and an “Autostart Spinup Time” anywhere from 300 to 1500 milliseconds,
depending on how easily the motor can propel the bike up to speed.
On bikes that you pedal to help get you underway, a short 200 to 300 millisecond
ramp will often work best, while a much longer ramp is required if you need to
start moving without pedaling.
If you feel the motor repeatedly trying to start when applying throttle, the
“Autostart Spinup Time” may be too short, or the “Autostart Max RPM” may be
too low. You may also generate faults such as “Instantaneous Phase
Overcurrent.” To correct this particular fault, try increasing either the “Current
Regulator Bandwidth” or the “PLL Bandwidth” parameters, or both. These
parameters are found under “Feedback Bandwidth Tuning” on the “Basic Setup”
tab.
-15-







































































