





























NOTE
If
[1] S-ramp Const Jerk
is selected and the reference during
ramping is changed the ramp time may be prolonged in
order to realize a jerk free movement which may result in
a longer start or stop time.
Additional adjustment of the S-ramp ratios or switching
initiators may be necessary.
For each of four ramps (parameter groups F-0#, E-1#, H-0#,
SP-7#, SP-8# and SP-9#) configure the ramp parameters:
ramp type, ramping times (duration of acceleration and
deceleration) and level of jerk compensation for S ramps.
Start by setting the linear ramping times corresponding to
the figures.
If S-ramps are selected then set the level of non-linear jerk
compensation required. Set jerk compensation by defining
the proportion of accel and decel times where acceleration
and deceleration are variable (i.e. increasing or decreasing).
The S-ramp acceleration and deceleration settings are
defined as a percentage of the actual ramp time.
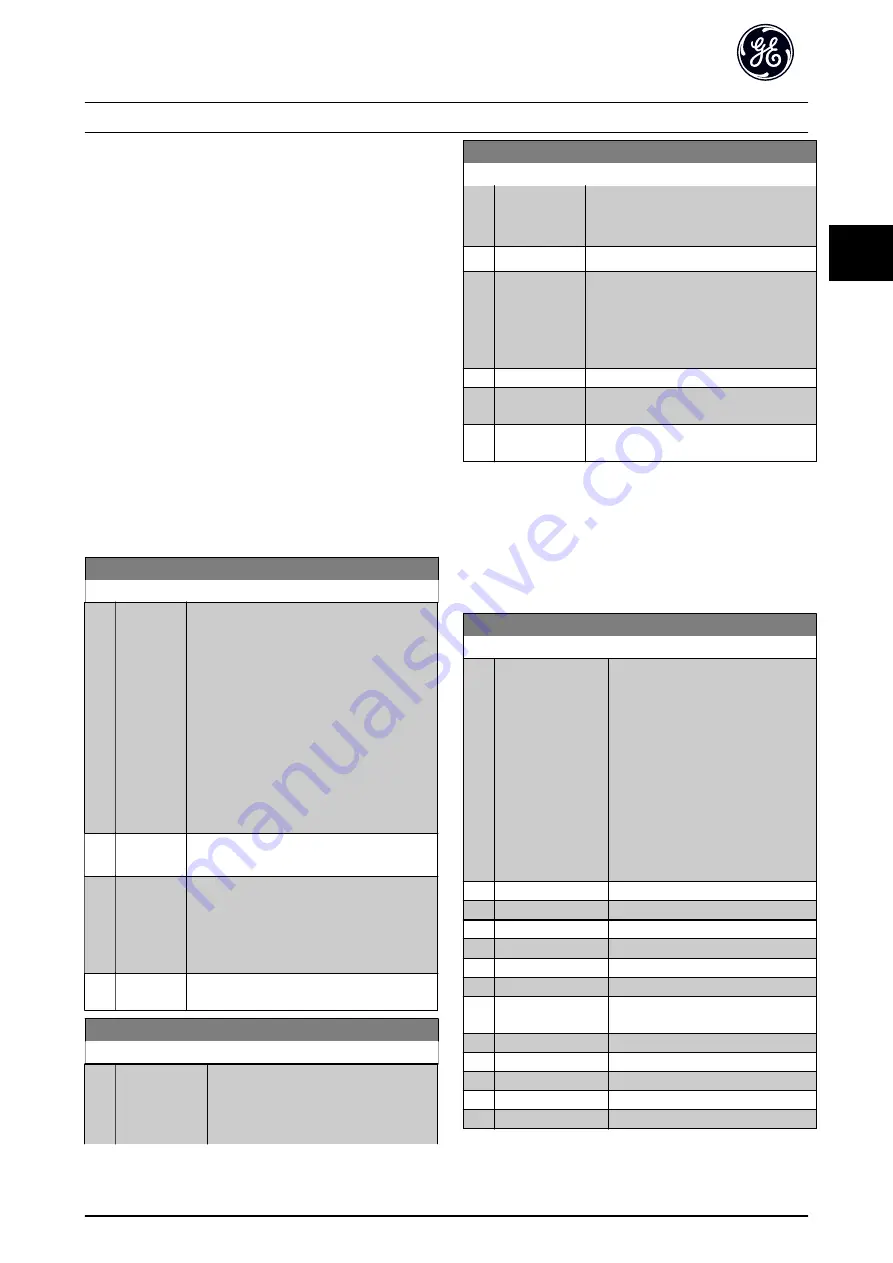
H-08 Reverse Lock
Option:
Function:
NOTE
This parameter cannot be adjusted while
the motor is running.
Select the motor speed direction(s) required.
Use this parameter to prevent unwanted
reversing. When
is set
to
[3] Process
,
is set to
[0]
Clockwise
setting
F-15 Motor Speed High Limit [Hz]
F-17 Motor Speed High Limit [RPM]
[0]
*
Clockwise
The reference is set to CW rotation. Reversing
input (Default term 19) must be open.
[1]
Counter
clockwise
The reference is set to CCW rotation.
Reversing input (Default term 19) must be
closed. If Reversing is required with ‘Reverse’
input is open the motor direction can be
[2]
Both
directions
Allows the motor to rotate in both directions.
H-09 Start Mode
Option:
Function:
NOTE
This parameter cannot be adjusted
while motor is running.
H-09 Start Mode
Option:
Function:
This function makes it possible to catch a
motor which is spinning freely due to a
mains drop-out.
[0]
*
Disabled
No function
[1]
Enabled
Enables the frequency converter to “catch”
and control a spinning motor.
When
is enabled,
have no function.
[2]
Enabled Always
[3]
Enabled Ref.
Dir.
[4]
Enab. Always
Ref. Dir.
NOTE
This function is not recommended for hoisting
applications.
3.7.2 H-2# Motor Feedback Monitoring
Parameters to configure Motor Feedback Monitoring.
H-20 Motor Feedback Loss Function
Option:
Function:
This function is used to monitor for
consistency in feedback signal, i.e. if
the feedback signal is available.
Select which reaction the frequency
converter should take if a feedback
fault is detected. The selected action
is to take place when the feedback
signal differs from the output speed
by the value set in
for longer than
the value set in
[0]
Disabled
[1]
Warning
[2]
*
Trip
[3]
Jog
[4]
Freeze Output
[5]
Max Speed
[6]
Switch to Open
Loop
[7]
Select Setup 1
[8]
Select Setup 2
[9]
Select Setup 3
[10]
Select Setup 4
[11]
stop & trip
Warning 90 is active as soon as the value in
is exceeded, regardless of the setting
Parameter Descriptions
AF-650 GP Programming Guide
DET-618C
61
3
3