





























6. If
TP
has increased, than the motor command line and encoder are in correct polarity. If
TP
has
decreased than the motor command line is in opposite polarity with the encoder.
If the system has reverse polarity, take the following steps to correct for it:
Brushed Motor
Choose
one
of the following:
1. Reverse the direction of the motor leads by swapping phase A and phase B
2. Reverse the direction of the encoder, see Step 6. Connecting Encoder Feedback, pg 19
Brushless Motor
Choose
one
of the following:
1. Reverse direction of the encoder, see Step 6. Connecting Encoder Feedback, pg 19
2. Reverse direction of the motor by swapping any two motor phases (
or
two hall sensors if using a
trapezoidal amplifier). The motor will now have to be re-commutated by using either the Trapezoidal
or Sinusoidal method, see Step 8a. Commutation of 3-phased Brushless Motors, pg 24
Non-wiring Options
You can reverse the direction of the motor command line by using the
MT
command
or
reverse direction of the
feedback by using the
CE
command (standard quadrature and step/direction feedback only). It is not
recommended to correct for polarity using configuration commands as an unexpected condition may arise
where these settings are accidentally over-ridden causing a runaway.
See the Command Reference for more details.
Step D.
Other Safety Features
This section only provides a brief list of safety features that the DMC can provide. Other features include
Encoder Failure Detection (
OA
,
OT
,
OV
) , Automatic Subroutines to create an automated response to events
such as limit switches toggling (
#LIMSWI
), command errors (
#POSERR
), and amplifier errors (
TA
,
#AMPERR
), and more. For a full list of features and how to program each see Chapter 8 Hardware & Software
Step 8. Wiring Motors to Galil's Internal Amps
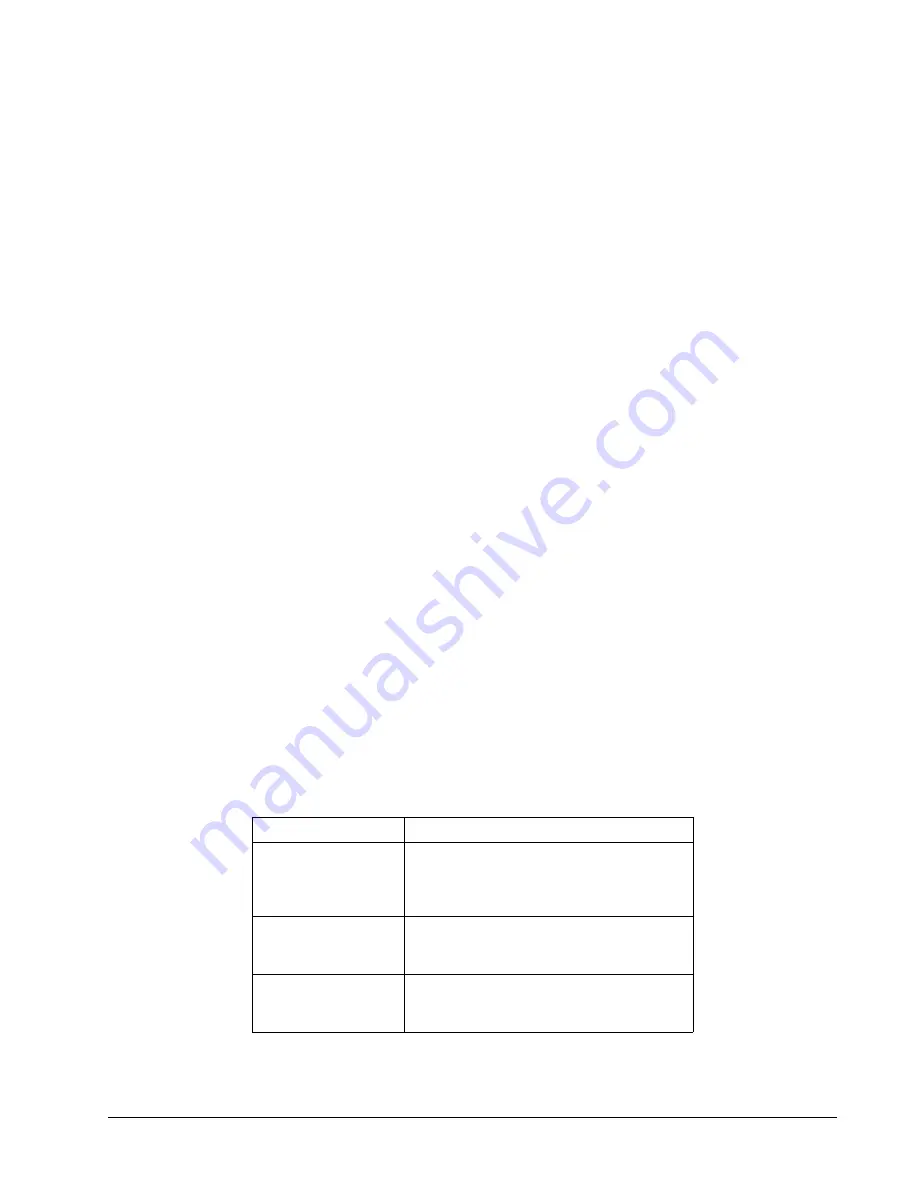
Table 2.8 below provides a general overview of the connections required for most systems connecting to a DMC
internal amplifier and controller system. Following the table is a step-by-step guide on how to do so.
Motor Type
Required Connections
Brushless servo motor
• Power to controller and internal amplifier
• Motor power leads to internal amplifiers
• Encoder feedback
• Hall sensors
(Not required for sinusoidal amplifiers)
Brushed servo motor
• Power to controller and internal amplifier
• Motor power leads to internal amplifiers
• Encoder feedback
Stepper motor
• Power to controller and internal amplifier
• Motor power leads to internal amplifier
• Encoder feedback
(
optional
)
Table 2.8: Synopsis of connections required to connect a motor to Galil's internal amplifiers
Chapter 2 Getting Started ▫ 22
DMC-40x0 User Manual