
























eRide
OPUS 6/
eRide
OPUS 7 GV-86/ GV-87
Dead Reckoning User
’
s Guide
SE16-900-002-00
6
FURUNO ELECTRIC CO., LTD. All rights reserved.
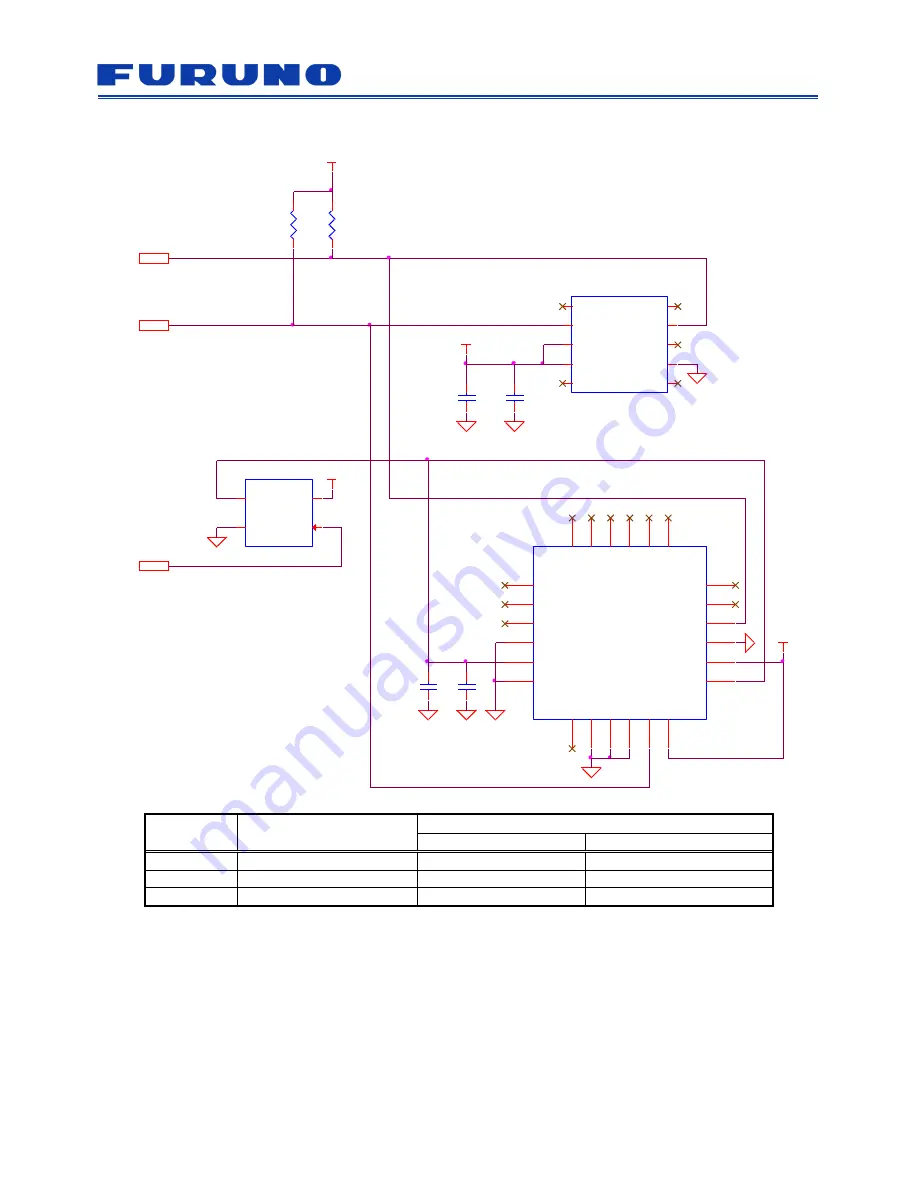
4.3 XV-4001BC and AIS328DQ
I/O signal
Description
Interface connection destination
eRideOPUS 6/7
GV-86/ 87
RESET
External reset signal
NRST
RST_N
SCL
I2C clock
TXD2_SCL
TXD2_SCL
SDA
I2C address/data bus
RXD2_SDA
RXD2_SDA
Figure 4.3 Reference Circuit of XV-4001BC and AIS328DQ
R1
10k
R2
10k
VCC
VCC
U2
XC8101AA01-GR-G
VOUT
1
VSS
2
CE
3
VIN
4
SDA
RESET
SCL
U3
AIS328DQ
NC
1
NC
2
INT_2
3
Reserv ed
4
VDD
5
GND
6
IN
T
_1
7
GN
D
8
GN
D
9
GN
D
10
SPC
/SC
L
11
CS
12
Reserv ed
13
VDD_IO
14
SDO/SA0
15
SDI/SDO/SDA
16
NC
17
NC
18
NC
19
NC
20
NC
21
NC
22
NC
23
NC
24
C3
10uF
C4
0.1uF
VCC
U1
XV-4001BC
Reserv ed
1
SCL
2
SS
3
VDD
4
Reserv ed
5
Reserv ed
6
GND
7
MOSI
8
SDA
9
Reserv ed
10
VCC
C2
10uF
C1
0.1uF
(*1)
(*1)
(*1)
(*4)
(*3)
(*3)
(*2)
(*2)
(*2)







































































