





























5
Commissioning
96
Festo – GDCP-CMMO-ST-EA-SY-EN – 2017-05c – English
5.5
Control via I/O control unit profile (valve)
The valve profile is based on the methodology of pneumatic valve pilots. The user only needs low-level
programming knowledge of the kind needed to control a pneumatic actuator. The device function is
simple to check.
By means of 7 digital inputs (DIN1…7), a maximum of 7 command records can be addressed directly.
Achievement of the objective of this command record is reported by the corresponding output
(DOUT1…7). DIN8/DOUT9 are reserved for execution of the homing function.
Supported functions:
–
Positioning mode, optionally with reduced torque
–
Automatic homing
–
Record changeover (start condition: “Interrupt”)
–
Power limitation of command record to maximum permitted force
–
Comparator: position
–
Message: Motion Complete
Non-supported functions:
–
Jogging and teaching the position via I/O
–
Operating modes for speed/force operation
–
Record Linking
–
Drag error monitoring, stationary monitoring
–
Asymmetric acceleration and deceleration ramp
5.5.1
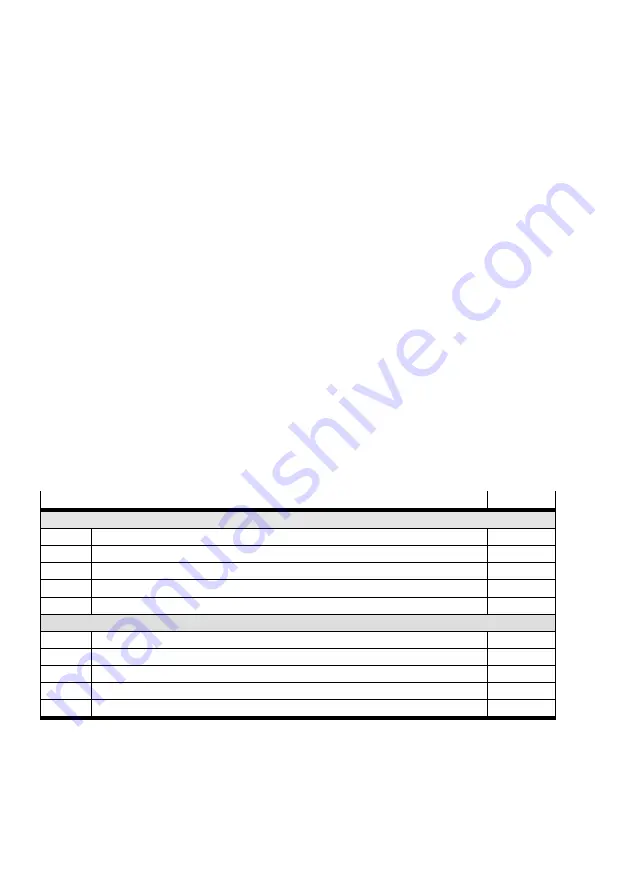
Digital inputs/outputs
Designation
Pin
DIN
1…7
RECORD 1…7 (START/STOP)
X1.1…7
8
Ref
X1.8
9
BRAKE CONTROL
X1.9
10
CONTROL ENABLE
X1.10
11
RESET
X1.11
DOUT
1…7
RECORD 1 … 7 (REACHED)
X1.12…18
8
IN ZONE
X1.19
9
REFERENCED
X1.20
10
Ready
X1.21
11
TORQUE LIMIT REACHED
X1.22
Tab. 5.4
Valve profile: digital inputs/outputs
The inputs are scanned at intervals (scanning rate tmax = 1 ms). That enables the controller to re
spond to an input signal after a delay.







































































