





























CAN Troubleshooting Guide
CAN-CBX-DIO8
Manual • Doc.-No.: C.3010.21 / Rev. 3.1
Seite 43 von 123
í
î
ï
ð
ñ ò ó ô
õ
ñ ò ó ô
ö
ó ÷
ñ ò ó ô
ø
ù
ú û
ü ýþ ÿ ü
þ
7.2 Electrical Grounding
CAN_GND of the CAN network should be connected to Functional earth potential (FE) at only one
point. This test will check if the CAN_GND is grounded in several places.
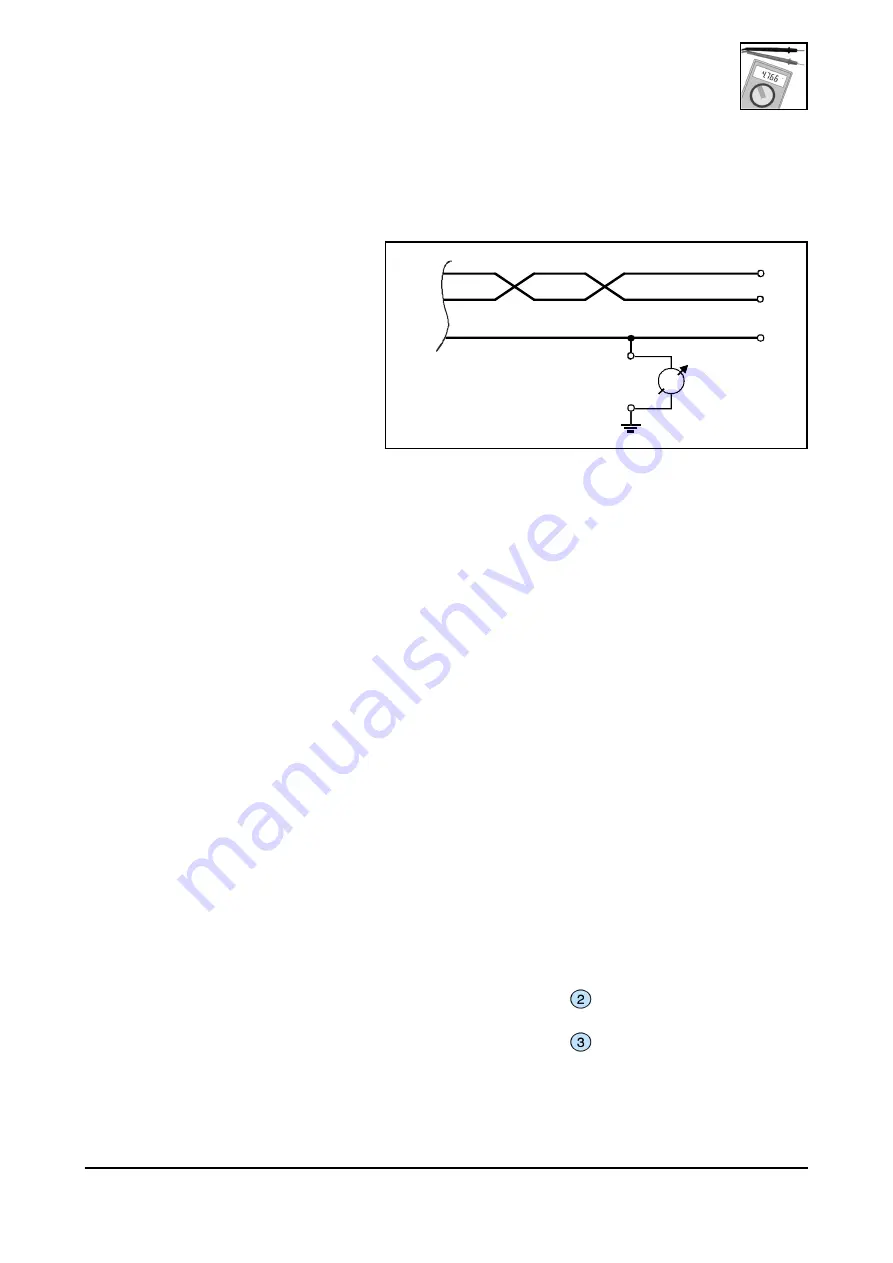
To test it, please
1. Disconnect the CAN_GND from the
earth potential (FE).
2. Measure the DC resistance between
CAN_GND and earth potential (see
figure on the right).
3. Reconnect CAN_GND to earth
potential.
Fig. 20: Simplified schematic diagram of
ground test measurement
The measured resistance should be higher than 1 M
. If it is lower, please search for additional
grounding of the CAN_GND wires.
7.3 Short Circuit in CAN Wiring
A CAN bus might possibly still be able to transmit data if there is a short circuit between
CAN_GND and CAN_L, but generally the error rate will increase strongly. Make sure that there is
no short circuit between CAN_GND and CAN_L!
7.4 CAN_H/CAN_L Voltage
Each node contains a CAN transceiver that outputs differential signals. When the network
communication is idle the CAN_H and CAN_L voltages are approximately 2.5 V measured to
CAN_GND. Faulty transceivers can cause the idle voltages to vary and disrupt network
communication.
To test for faulty transceivers, please
1.
Turn on all supplies.
2.
Stop all network communication.
3.
Measure the DC voltage between CAN_H and CAN_GND
(see figure at previous page).
4.
Measure the DC voltage between CAN_L and CAN_ GND
(see figure at previous page).
Normally the voltage should be between 2.0 V and 3.0 V.







































































