





























Digitax ST User Guide
81
Issue: 5
Table 9-38 EoE - Default gateway W
gateway
This is the most significant octet of the EtherCAT interface EoE default
gateway.
Table 9-39 Default gateway X
gateway
This is the second most significant octet of the EtherCAT interface EoE
default gateway.
Table 9-40 Default gateway Y
gateway
This is the third most significant octet of the EtherCAT interface EoE
default gateway.
Table 9-41 Default gateway Z
gateway
This is the least significant octet of the EtherCAT interface EoE default
gateway.
Although parameters Pr
17.10
- Pr
17.21
have RW access, changing
them via the parameters will have no affect to the EoE settings. The EoE
configuration for the EtherCAT interface can only be done with an
EtherCAT master which supports the EoE protocol (e.g. TwinCAT). The
settings for Pr
17.10
- Pr
17.21
will need to be set by the Master and
these parameters are for display purposes only.
9.17.4 EtherCAT interface reduce serial interface
priority
Table 9-42 Reduce Drive serial interface priority
It is not possible for the both the Drive and the EtherCAT interface to
support all of the available serial communication protocols
simultaneously. This means that the user must decide if they wish the
drive to provide the primary communication interface via its serial RJ45
connector, or the EtherCAT interface. In the default state the primary
interface will be provided by the drive.
Pr
17.37
= OFF (default):
It will not be possible to forward on messages that are intended for either
the drive or another Solutions Module. The EtherCAT interface will be
able to handle two types of messages:
1. Those that access Drive parameters
2. Those that access SM-Applications parameters.
Pr
17.37
= ON:
The EtherCAT interface will request that the drive permits it to become
the primary communication interface. If the drive is able to transfer
control then the following restrictions will be imposed:
1. The drives serial interface will only be able to handle messages that
are 32 bytes or less. A Remote LCD keypad would continue to work,
although SM-Application parameters would not be visible. If a
message is received that is too long for the drive to handle, no reply
will be sent.
2. Any LCD keypad installed (not remotely mounted) to the drive will
stop working.
Pr
17.37
must be set to ON to achieve EoE communications.
9.18 Drive profile (DSP-402) support
EtherCAT interface supports the following modes of the DSP-402 profile:
•
Cyclic sync position mode
•
Interpolated position mode
•
vl velocity mode
•
Profile torque mode
•
Homing mode
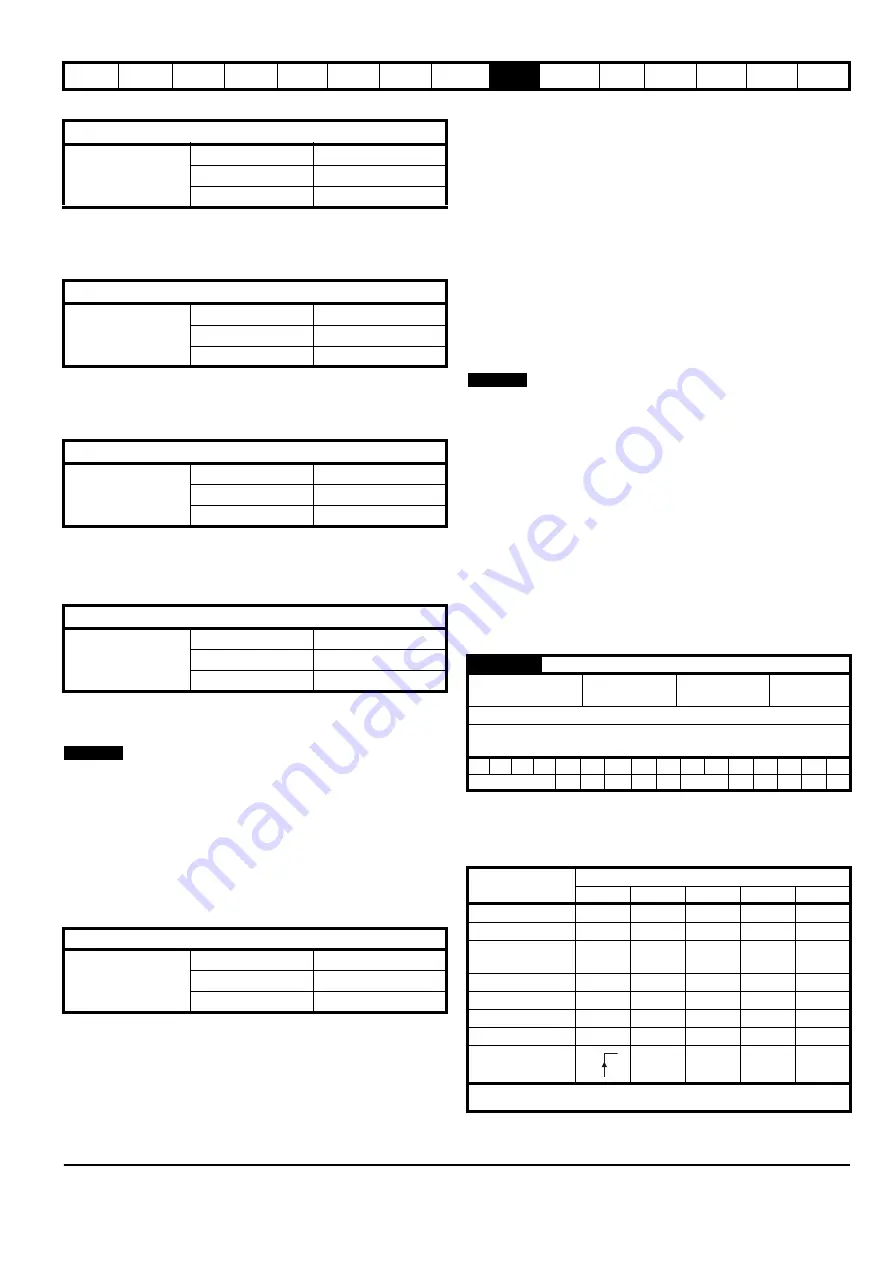
9.18.1 0x6040 Controlword
This provides the primary method of controlling the behavior of the drive
e.g. enabling, disabling, resetting, etc. Table 9-43 describes the format of
the control word. The individual bits are used in combinations (see Table
9-44) to sequence the drive through the state machine described in
Figure 9-9.
Table 9-43 Controlword
LEGEND: ms = manufacturer-specific; r = reserved; oms = operation mode
specific; h = halt; fr = fault reset; hos = homing operation start; eo = enable
operation; qs = quick stop; ev = enable voltage; so = switch on
Table 9-44 Command coding
EoE - Default gateway W
gateway
Pr
17.18
Default
0
Range
0 to 255
Access
RW
EoE - Default gateway X
gateway
Pr
17.19
Default
0
Range
0 to 255
Access
RW
EoE - Default gateway Y
gateway
Pr
17.20
Default
0
Range
0 to 255
Access
RW
EoE - Default gateway Z
gateway
Pr
17.21
Default
0
Range
0 to 255
Access
RW
Reduce Drive serial interface priority
Pr
17.37
Default
OFF
Range
OFF - ON
Access
RW
NOTE
0x6040
Controlword
Access: RW
Range: 0 to
65535
Size: Unsigned
16
Unit: N/A
Default: N/A
Description:
Provides the primary method of controlling the behavior
of the drive.
15 14 13 12
11
10
9
8
7
6
5
4
3
2
1
0
Reserved
ila
r
oms
h
fr
oms
hos eo
qs
ev
so
Command
Bits of the controlword
Bit 7
Bit 3
Bit 2
Bit 1
Bit 0
Shutdown
0
X
1
1
0
Switch on
0
0
1
1
1
Switch on + enable
operation
0
1
1
1
1
Disable voltage
0
X
X
0
X
Quick stop
0
X
0
1
X
Disable operation
0
0
1
1
1
Enable operation
0
1
1
1
1
Fault reset
X
X
X
X
NOTE: Automatic transition to Enable operation state after executing SWITCHED
ON state functionality.
NOTE





















































