





























38
Unidrive M100 / M101 Control User Guide
Issue Number: 1
8.2 Maximum motor rated current
The maximum motor rated current is the
Maximum Heavy Duty Current
Rating
(00.077).
The values for the Heavy Duty rating can be found in the
Power
Installation Guide
.
8.3 Current limits
The default setting for the current limit parameters for size 1 to 4 is:
•
165 % x motor rated torque producing current for open loop mode
There are three parameters which control the current limits:
•
Motoring current limit: power flowing from the drive to the motor
•
Regen current limit: power flowing from the motor to the drive
•
Symmetrical current limit: current limit for both motoring and regen
operation
The lowest of either the motoring and regen current limit, or the
symmetrical current limit applies.
The maximum setting of these parameters depends on the values of
motor rated current, drive rated current and the power factor.
The drive can be oversized to permit a higher current limit setting to
provide higher accelerating torque as required up to a maximum of
1000 %.
8.4 Motor thermal protection
A time constant thermal model is provided to estimate the motor
temperature as a percentage of its maximum allowed temperature.
The motor thermal protection is modelled using losses in the motor. The
losses in the motor are calculated as a percentage value, so that under
these conditions the
Motor Protection Accumulator
(04.019) would
eventually reach 100 %.
Percentage losses = 100 % x [Load related losses]
Where:
Load related losses = [I / (K
1
x I
Rated
)]
2
Where:
I =
Current Magnitude
(04.001)
I
Rated
=
Motor Rated Current
(00.006)
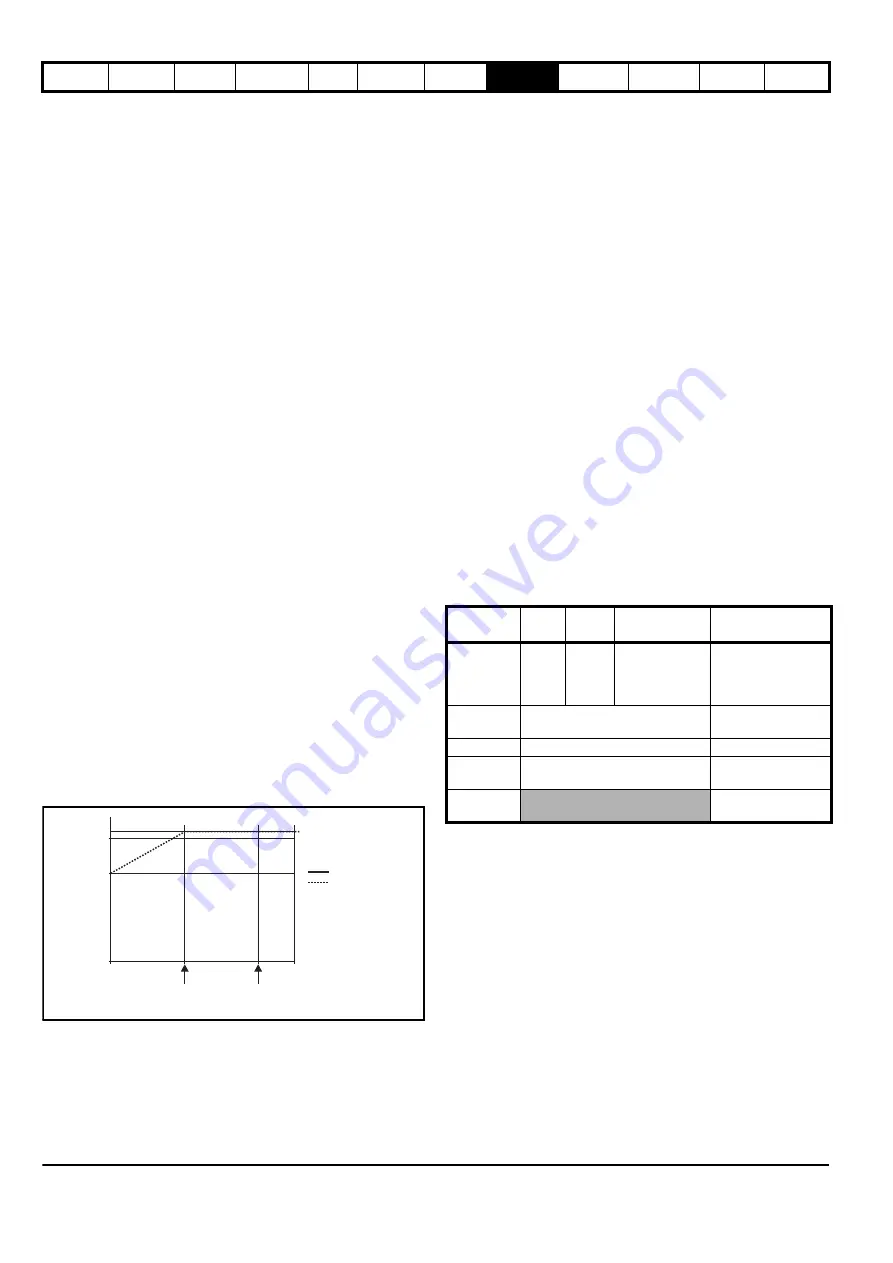
If
Motor Rated Current
(00.006)
≤
Maximum Heavy Duty Current
(00.077)
Figure 8-1 Motor thermal protection (Heavy Duty)
If Pr
04.025
is 0 the characteristic is for a motor which can operate at
rated current over the whole speed range. Induction motors with this
type of characteristic normally have forced cooling. If Pr
04.025
is 1 the
characteristic is intended for motors where the cooling effect of motor
fan reduces with reduced motor speed below 50 % of base speed/
frequency. The maximum value for K1 is 1.05, so that above the knee of
the characteristics the motor can operate continuously up to 105 %
current.
When the estimated temperature in Pr
04.019
reaches 100 % the drive
takes some action depending on the setting of Pr
04.016
. If Pr
04.016
is
0, the drive trips when Pr
04.019
reaches 100 %. If Pr
04.016
is 1, the
current limit is reduced to (K - 0.05) x 100 % when Pr
04.019
reaches
100 %.
The current limit is set back to the user defined level when Pr
04.019
falls below 95 %. The thermal model temperature accumulator
accumulates the temperature of the motor while the drive remains
powered-up. By default, the accumulator is set to the power down value
at power up. If the rated current defined by Pr
00.006
is altered, the
accumulator is reset to zero.
The default setting of the thermal time constant (Pr
04.015
) is 179 s
which is equivalent to an overload of 150 % for 120 s from cold.
8.5 Switching frequency
The default switching frequency is 3 kHz, however this can be increased
up to a maximum of 16 kHz by Pr
00.037
.
If switching frequency is increased from 3 kHz the following apply:
1. Increased heat loss in the drive, which means that derating to the
output current must be applied.
See the derating tables for switching frequency and ambient
temperature in the
Power Installation Guide
.
2. Reduced heating of the motor - due to improved output waveform
quality.
3. Reduced acoustic noise generated by the motor.
4. Increased sample rate on the speed and current controllers. A trade
off must be made between motor heating, drive heating and the
demands of the application with respect to the sample time required.
Table 8-1 Sample rates for various control tasks at each
switching frequency
8.5.1 Field weakening (constant power) operation
The drive can be used to run an induction machine above synchronous
speed into the constant power region. The speed continues to increase
and the available shaft torque reduces. The characteristics below show
the torque and output voltage characteristics as the speed is increased
above the rated value.
0.00
0.70
1.00
Pr
= 0
Pr
= 1
04.025
04.025
1.00
1.05
Base speed
/
frequency
50% of base
speed
/
frequency
K
0.667,
1 kHz
3, 6, 12
kHz
2, 4, 8, 16
kHz
Open loop
Level 1
250
μ
s
167
μ
s
2 kHz = 250
μ
s
4 kHz = 125
μ
s
8 kHz = 125
μ
s
16 kHz = 125
μ
s
Peak limit
Level 2
250
μ
s
Current limit and
ramps
Level 3
1 ms
Voltage controller
Level 4
4 ms
Time critical user
interface
Background
Non-time critical user
interface
Summary of Contents for Unidrive M100
Page 100: ...0478 0352 01 ...







































































