





























Copy right © 2018 Shenzhen Emakefun Technology co., Ltd.
23
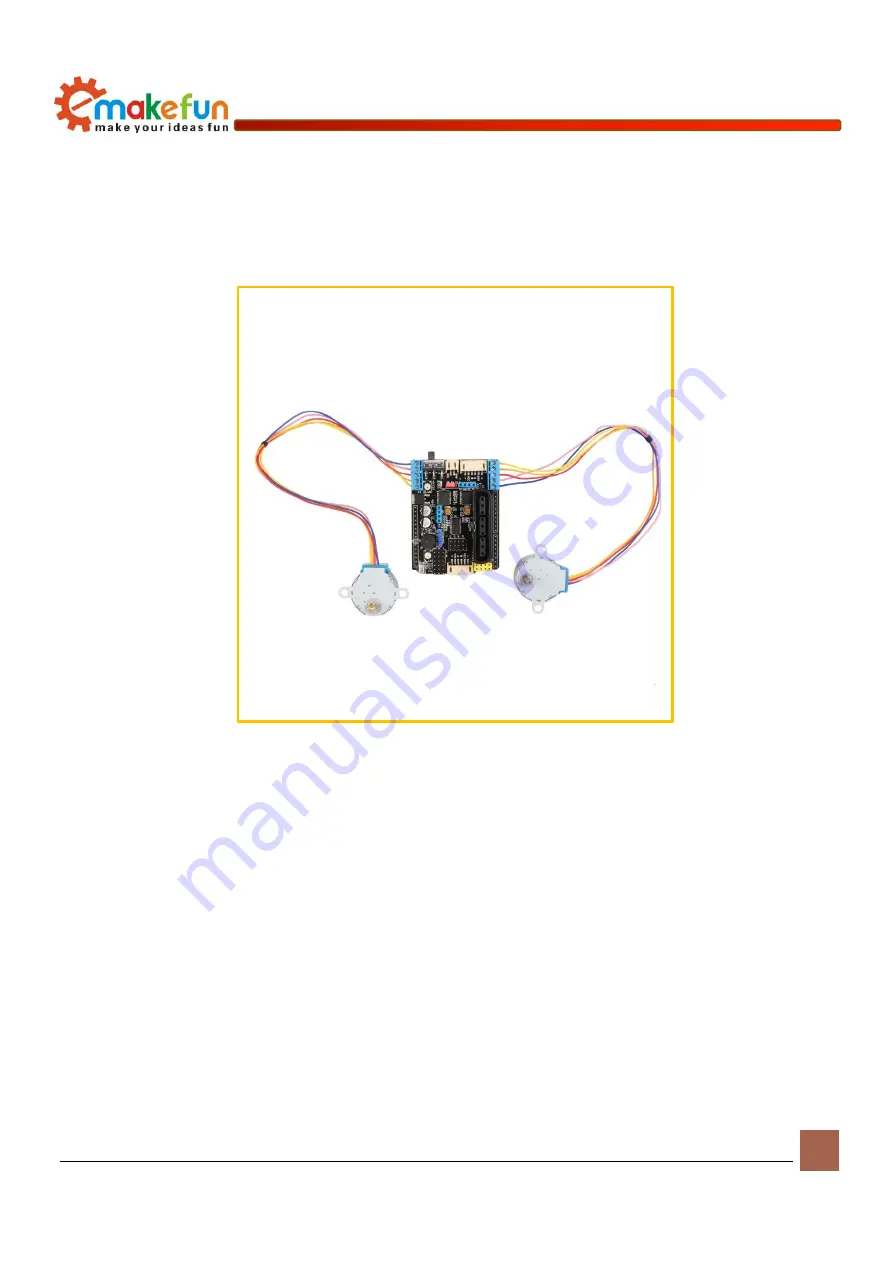
fully charged when driving the motor. After connecting the motor to the line (as shown in Figure 7-2), find
the stepper motor test sample program in the sample program (sample program file path:
load file ->
AdvancedExperiment -> Stepper-> Stepper.ino)
. Burning the program into the development board, then turn
on the power of the driver board, you will find the stepper motor rotates. The schematic diagram of the
stepper motor is shown in Figure 6-4.
Figure 7-2 Stepper motor connection diagram
Encode Motor
Encoder Introduction
An encoder is a rotary sensor that converts angular or angular velocity into a series of electrical digital
pulses. We can measure the displacement or velocity information through the encoder. The encoder is
divided into output data types and can be divided into incremental encoders and absolute encoders. From the
principle of encoder detection, it can also be divided into optical, magnetic, inductive and capacitive.
Commonly used are photoelectric encoders (optical) and Hall encoders (magnetic) and our balanced car
trials are Hall encoders.
Encoder Principle
A Hall encoder is a sensor that converts the amount of mechanical geometric displacement on an output
shaft into a pulse or digital quantity by magnetoelectric conversion. The Hall encoder consists of a Hall code







































































