





























DVP15MC11T Operation Manual
_7
Insufficient SYNC period time will result in the controlled device to fail to receive SYNC signal and
unpredictable operations. Refer to section 7.3 for SYNC period setting.
Rising edge or falling edge of local input points (I0~I7
,
I10~I17)
The task is triggered when rising edge or falling edge of input point signal is detected. The response time
of input points can be set through the filter function.
CANopen bus SYNC message
The task is triggered when SYNC signal is produced at CANopen port of the controller.
Z pulse rising edge for incremental encoder 1
The task is triggered when the rising edge of Z signal of the first encoder is detected at Encoder port of
the controller.
Z pulse rising edge for incremental encoder 2
The task is triggered when the rising edge of Z signal of the second encoder is detected at Encoder port of
the controller.
7.1.2
Priority levels of Tasks
The controller can not perform multiple tasks simultaneously. Every task must be given a priority level and
they are executed according to preset priorities. Priority level can be set within the range of 1 to 24. (1 is the
highest priority and 24 is the lowest priority.) The priority level of each task must be unique. The task with
higher priority takes priority to perform. The high-priority task can interrupt the low-priority task.
We recommend that the task which has a high requirement of real time should be given a high priority and the
task which has a low requirement of real time should be given a low priority. The priority of the default motion
control task built in the CANopen Builder software is 1 by default.
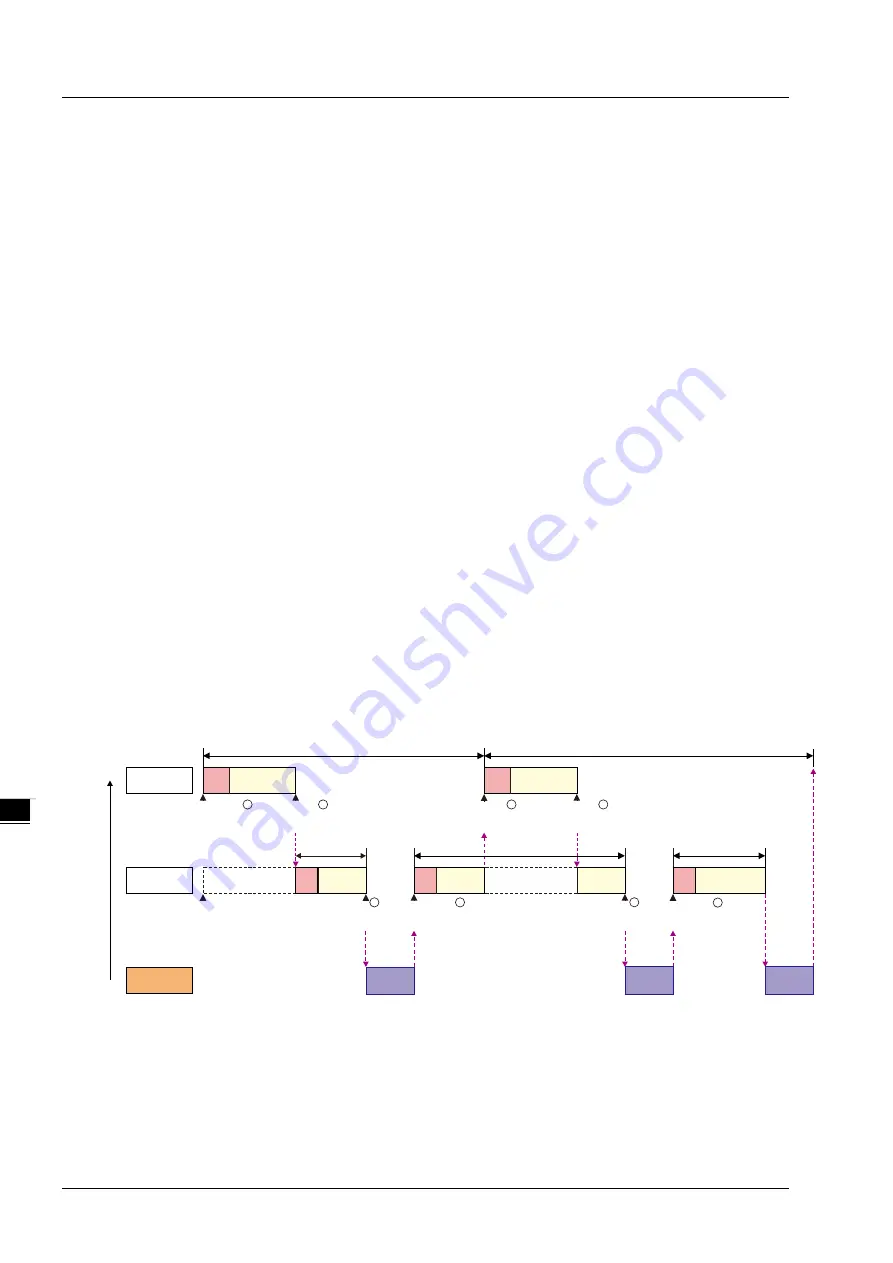
The principle for multi-task execution
When the execution conditions of two tasks are met simultaneously (Cyclic task and
freewheeling task)
I O
User
program
Time interv al between tasks
Cyclic task
(
)
Pr ior ity 1
Sys tem
proces sing
Priority
High
Low
IO
User
program
Time int erval between t asks
Task execution
condition met
IO
Sy st em
pr ocess ing
Pause
User
program
I O
User
program
Paus e
IO
User
program
Fr e ewh eelin g task
(
)
Pr ior ity 2
Task execution
finished
Task ex ecution
condit ion met
Tas k exec ut ion
finished
Task ex ecution
c ondition met
Tas k exec ut ion
finished
Task execution
condition met
Tas k exec ut ion
condition met
Task execu tion tim e
Task execu tion t im e
Task e xecut ion time
Tas k exec ut ion
finished
1
2
3
5
6
7
8
4
Sys tem
proces sing
User
program
Sys t em
proc ess ing
○
1
E
A
The execution conditions for the cyclic task and freewheeling task are met at the same time. The
cyclic task is executed first because of its higher priority.
A
○
2
E
A
When the cyclic task execution is finished, the freewheeling task execution starts.
7-4
Summary of Contents for DVP15MC11T
Page 9: ...Memo viii...
Page 15: ...DVP15MC11T Operation Manual _2 MEMO 2 4...
Page 71: ...DVP15MC11T Operation Manual _7 Memo 7 10...
Page 81: ...DVP15MC11T Operation Manual _8 Timing Chart F_TRG_CLK F_TRG_Q 8 10...
Page 158: ...Chapter 8 Logic Instructions 8_ The program 1 ASIN EN ENO In Out ASIN_EN ASIN_In Out1 8 87...
Page 249: ...DVP15MC11T Operation Manual _8 8 178...
Page 285: ...DVP15MC11T Operation Manual _8 Memo 8 214...
Page 323: ...DVP15MC11T Operation Manual 10 MEMO 10 34...
Page 549: ...DVP15MC11T Operation Manual A MEMO A 16...







































































