





























*
M’Ax Advanced User Guide
30
Issue Number: 4
www.controltechniques.com
This parameter is the r.m.s. current from each output phase of the drive.
The torque demand is derived from the torque reference and offset. The units of the torque demand are % of allowed maximum torque to the
motor (Based on Symmetrical current limit).
100% rated torque = 100% rated current of the motor.
The Current demand is read from SLM. The units of the current demand are % of rated drive current.
620 = 200% rated drive current
Symmetrical current limit is used to scale the maximum motor current. This is used to scale the current scaling from SLM. After changing this
parameter SLM-PID update is necessary to use new settings. Refer to P.I.D gain calculation section in Menu 3.
This is the parameter for main torque reference. The units are % of maximum motor rated torque based on symmetrical current limit with a
resolution of 0.1%. If connected to an analog input on the drive this parameter is updated every 250
µ
s.
This parameter is for an offset to be added to the main torque reference. The torque offset is updated every 1ms when connected to an
analog input, and so parameter 4.08 should be used for fast updating if required.
The torque offset is added to the torque reference when parameter 4.10 is set to one.
0 = Torque reference offset disable
1 = Torque reference offset enable
0 = Speed control mode
The torque demand is equal to the speed loop output.
1 or 2 = Torque control
The torque demand is given by the sum of the torque reference and the torque offset, if enabled. The speed is not limited in any way,
however, the drive will trip at the over speed threshold if runaway occurs. To activate a parameter change, a save and power down is
necessary.
A first order filter, with specified bandwidth by this parameter is provided on the current demand to reduce acoustic noise and vibration
produced in an application. The filter introduces a lag in the speed loop, and so the speed loop gains may need to be reduced to maintain
stability as the filter time constant is increased. Alternative bandwidth can be selected depending on the value of the speed controller gain
selector [3.16].
[3.16] = 1 parameter [4.12] is used
[3.16] = 2 parameter [4.23] is used
[3.16] = 3 parameter [4.27] is used
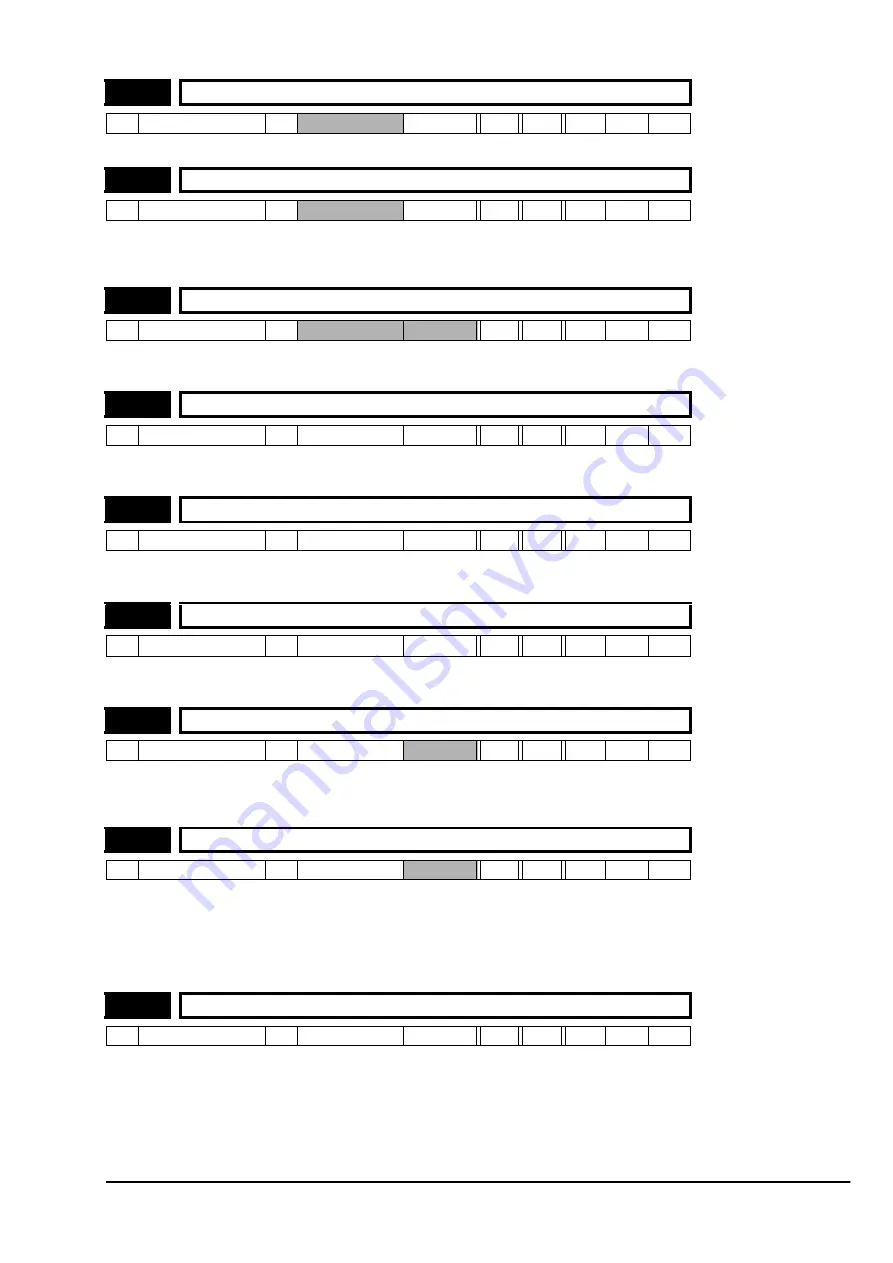
4.01
Motor current magnitude
ô
0 ~ I
OL
ð
A
RO
Uni
P
0.07
4.03
Torque demand
ô
±0 ~ 200
ð
%I
T
A
RO
Bi
P
4.04
Current demand
ô
0 ~ 620
ð
RO
Uni
P
4.07
Symmetrical current limit Kc1
ô
0 ~ 300
ð
200.0
%I
M
RW
Uni
0.18
4.08
Torque-reference
ô
±200
ð
0.0
%I
LIM
RW
Bi
4.09
Torque-reference offset
ô
±200
ð
0
%I
LIM
RW
Bi
4.10
Torque-reference offset enable
ô
0 ~ 1
ð
0
RW
Bit
4.11
Torque mode selector
ô
0 ~ 2
ð
0
RW
Uni
4.12
Current demand filter 1 cut-off frequency
ô
0 ~ 1200
ð
500
Hz
RW
Uni
0.16
Summary of Contents for M'Ax
Page 9: ... M Ax Advanced User Guide 6 Issue Number 4 www controltechniques com ...
Page 47: ... M Ax Advanced User Guide 44 Issue Number 4 www controltechniques com ...
Page 49: ... M Ax Advanced User Guide 46 Issue Number 4 www controltechniques com ...
Page 73: ... M Ax Advanced User Guide 70 Issue Number 4 www controltechniques com ...







































































