



















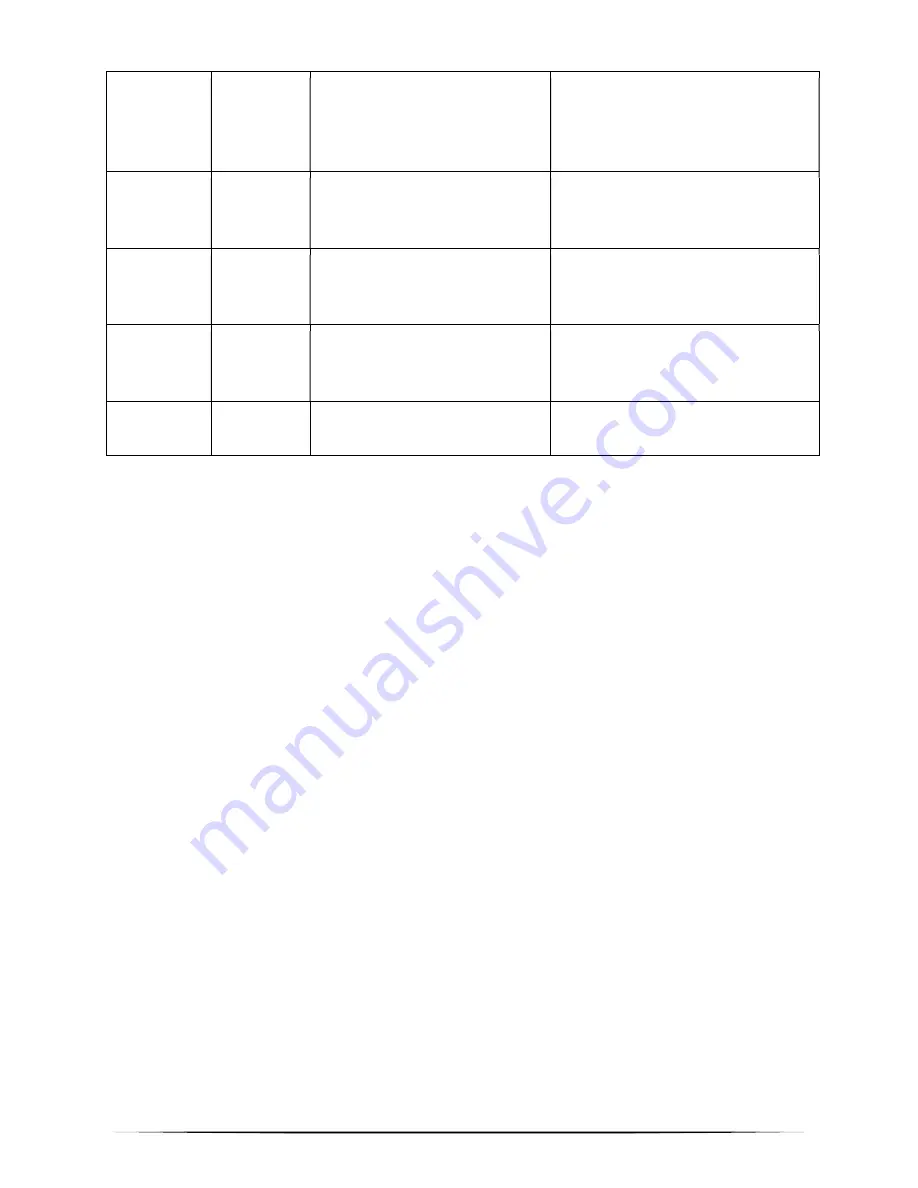
34
COM
Comm
Watch
Dog
Bit 4
Interval without command
was too long
Provide the position or velocity
commands in a reliable and short
enough time interval. Increase
maxMissedCom.
LAG
Position
Lag
Bit 5
Position is too far away from
the setpoint position
Provide setpoint positions
reachable to the current motor
position. Increase maxLag.
ENC
Encoder
Error
Bit 6
The sequence of the
quadrature encoder pulses did
not fit.
Check connection cable motor –
motor controller
OC
Over
Current
Bit 7
Current value too high
Decrease applied load on motor.
Increase maxCurrent.
CAN
CAN Error
Bit8
CAN error occured
CAN bus to crowded? All
connectrions ok?
A normal state after start-up of the board is an error code of 0x1C (Motor not
enabled, CommWatchDog, PositionLag)
After an error reset the normal state is 0x04 (Motor not enabled).
After enabling the motor the status is 0x00, now the motor is ready to move.
To reach this state, the communication has to provide values in a fast and reliable
way and, when in position control, in the reach of the motor. These restrictions are
taken to prevent unwanted motion due to e.g. a blue screen on the control PC, a
broken communication, or programming bugs.







































































