burster Italia s.r.l. · Sede legale ed operativa · Via Cesare Battisti, 16/18 · 24035 Curno (BG) · Tel. +39 035 618120 · Fax +39 035 618250
e-mail:
· http://
www.burster.it
C.F. e P.IVA 11048400151 · Capitale sociale Euro 49.920,00 · R.E.A. di Bergamo 276749
Apparecchi di misura di precisione. Sensori e Sistemi
per grandezze elettriche, termiche e meccaniche
2.2
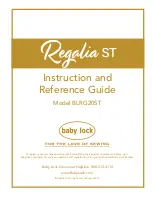
Electrical Setup
The supply of the rotor electronics occurs by an alternating voltage, generated in the stator, which transfers to the
rotor through a rotating transformer. There, it is rectified and stabilized. With this supply, the strain gauge bridge is
fed.
For the electrical calibration control of the sensor, a control signal is up-modulated to the supply by the µ-processor in
the stator and transferred to the rotor. There, it is filtered and evaluated by the µPC, which also activates the internal
switch for the detuning of the strain gauge bridge.
The measuring signal of the strain gauge bridge is conditioned in an amplifier and then converted into a digital signal,
which will be transferred to the stator by another rotating transformer. Compared to the analog signal, the measuring
signal in digital form is much more disturbance-free. The remaining distance of the measuring signal within the
sensor occurs in digital form, completely. Thus, the measuring system achieves a high reliability of operation.
This signal is further conditioned in the stator, comes into a µ-processor, then - depending upon sensor type - it is
converted to a voltage signal, digital signal or to current and will then reach the output of the sensor and can be
directly measured at the connector.
DC
/
DC
Oscillator
4
MHz
Signal
Conditioning
Signal Adaption
Analog/Digital
Signal
Conditioning
A/D-Converter
± 15 bit
µ
-
Processor
µ
-
Processor
Rotation Angle (Option)
Supply
voltage
Calibration
Control
Signal
Output
Channel 1
Rotation
Angle
Angle Output
(Option)
Amplifier
Stator
Rotor
Rotating Transformer
Serial Data Transmission
A
B
Filter for
Control Signal
Cycle and
Control Signal
Supply and
Control Signal
Rotating Transformer
Signal Adaption
Analog/Digital
Signal
Output
Channel 2
AC
DC
SG
SG
A/D-Converter
± 15 bit
Amplifier
2
1
Block diagram for serial signal transmission.
2.2.1 Sensors with Analog Output
At this output, the digital signal is converted into DC voltage of 0 V ±5 V, proportionally to the torque and is available
at the connector output.
2.2.2 Sensors with RS485 Interface
The torque sensor has a digital interface RS485 for the signal output and automatic sensor identification.
The protocol enables high dynamics.
See separate manual for further information.