





























Hardware Reference
PreciseFlex™ DDR Collaborative Robots
P/N: PFD0-DI-00010, Rev 5.0.0, April 9, 2022
72
Copyright © 2022, Brooks Automation, Inc.
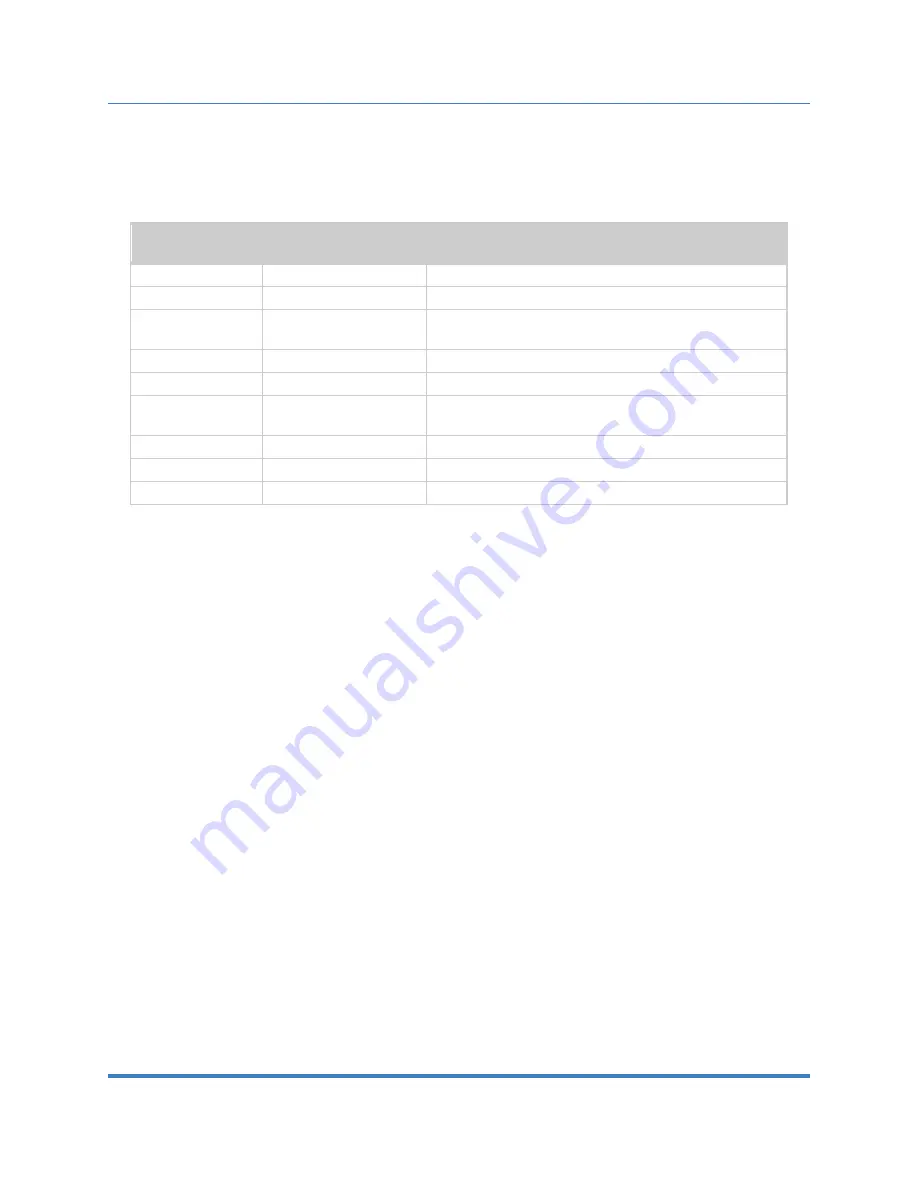
Pin
GPL Signal
Number
Description
1
200013
Digital Output 1
2
200014
Digital Output 2
3
200015
Digital Output 3:LED driver (LED Out 3 Jumper Pins
2&3) OR TXD (Out 3 Jumper Pins 1&2)
4
24 VDC output
5
GND
6
210001
Digital/Analog Input 1 (IN1 Jumper Pins 2&3) OR
RXD (IN1 Jumper Pins 1 &2)
7
210002
Digital/Analog Input 2
8
210003
Digital/Analog Input 3
User Plug Part No
TE 794617-8, Pins 794610-1 (20-24AWG Tin)
Ethernet Interface
PFDD robots include an Ethernet switch that implements two 10/100 Mbit Ethernet ports. This capability
was designed to permit the controller to be interfaced to multiple Ethernet devices such as other Precise
controllers or robots, remote I/O units and Ethernet cameras. The Ethernet switch automatically detects
the sense of each connection, so either straight-thru or cross-over cables can be used to connect the
controller to any other Ethernet device.
Due to limited space on the Facilities Panel, only one of the two Ethernet ports is available via an external
RJ45 connector. This external Ethernet port is typically used to interface the robot to a PC. The second
Ethernet port is only available inside the inner link of the robot. In some cases, it may be used to connect
an Ethernet camera that is mounted on the robot.
In this case, a PC that is connected to the Ethernet plug on the Facilities Panel can communicate with the
robot’s controller as well as receive images from an arm-mounted camera. (For the initial release of this
robot, arm mounted cameras are not supported.)
If a camera is mounted in the workcell, an external Ethernet switch must be added to connect these
cameras and the robot to a PC.
See the
Setup and Operation Quick Start Guide
for instructions on setting the IP address for the
controller.





































































