





























12.5.3
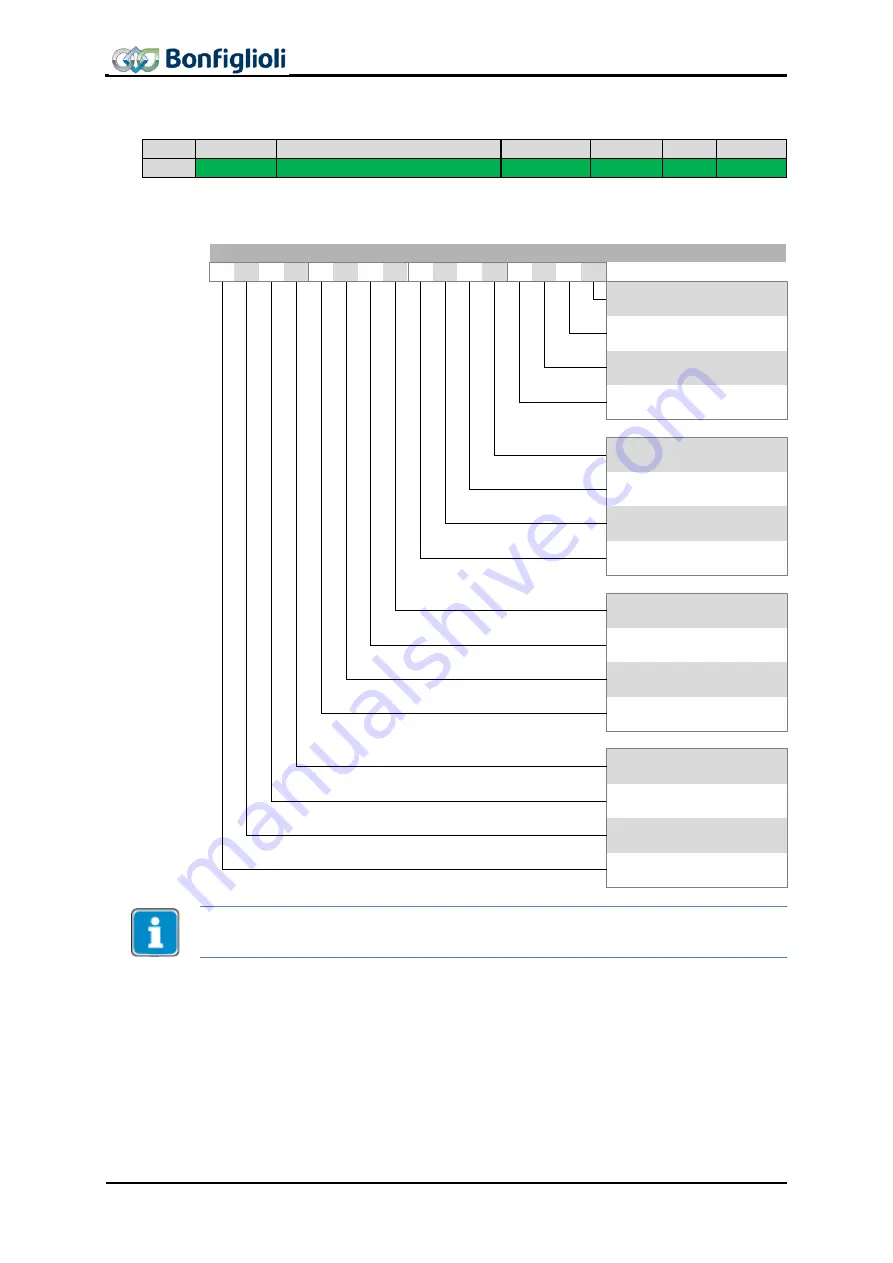
0x6040/0 Control word
Index Sub-index
Meaning
Data type Access Map Def.-Val
0x6040
0
Control word
Unsigned16
rw
Rx
0
Object 0x6040/0
Control word is relevant to the inverter remote state machine whenev-
er parameter
Local/Remote
412 is set to 1 (remote state machine).
Control word (Control word)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit
0
Switch on
1
Enable voltage
2
Quick stop (Low active)
3
Enable operation
4
Operation mode specific
5
Operation mode specific
6
Operation mode specific
7
Fault reset
8
Halt
9
Operation mode specific
10
Reserved
11
Manufacturer specific
12
Manufacturer specific
13
Manufacturer specific
14
Manufacturer specific
15
Manufacturer specific
Bits 4, 5, 6 and 9 … 15 are used in motion control configurations (p.30 = x40) only.
See chapter 14 “Inverter Control” and 16.1.1 “Control Word overview”.
72
CM-EtherCAT
07/13







































































