20
english
4
Configuration (continued)
4.7.9 Scaling: Total measuring range
(Total measuring range in steps)
In this parameter, the number of steps into which the
nominal stroke is to be divided can be indicated. From this
the BTL7-T500… calculates the required step length. Step
lengths under 1 µm are smaller than the measurement
resolution and thus do not make sense.
Resolution (step width) =
Nominal length
Measuring range in measuring
units
This parameter indirectly determines the parameter
Scaling: Measuring steps per nominal stroke
, so that one
of the two parameters should always be set to zero. If both
Scaling: Measuring units per nominal stroke
and
Scaling:
Total measuring range
are set,
Scaling: Total measuring
range
has the higher priority.
4.7.10 Tolerated number of sign-of-life errors
(Max Master Sign-Of-Life failures)
If sign-of-life monitoring is activated in the controller, a
counter is incremented after each telegram. This allows the
BTL7-T500-... to recognize whether it has missed a
telegram. This parameter sets the number of errors from
which the device starts to a sign-of-life error in G1XIST2.
4.7.11 Speed unit (Speed measuring unit)
The speed can be selected from
Steps/1000 ms
,
Steps/100 ms
, and
Steps/10 ms
. The step length is
defined by the parameter
Scale: measurement steps per
nominal length
or
Scale: Entire measurement range
.
4.7.12 Diagnostic time for FMM
This parameter can only be set on modules with FMM.
If the number of magnets changes in flexible magnet mode
(FMM), a diagnostic is output. The time during which the
diagnostic is pending can be determined with this
parameter. The diagnostics time in milliseconds is 4x that
of the set value. This means a time between 4 ms and
1022 ms can be set. Entries below 35 ms have no effect,
since the magnetostrictive linear position sensor needs this
time in order to output a new, valid position value after the
number of magnets has changed (see
4.8
Services
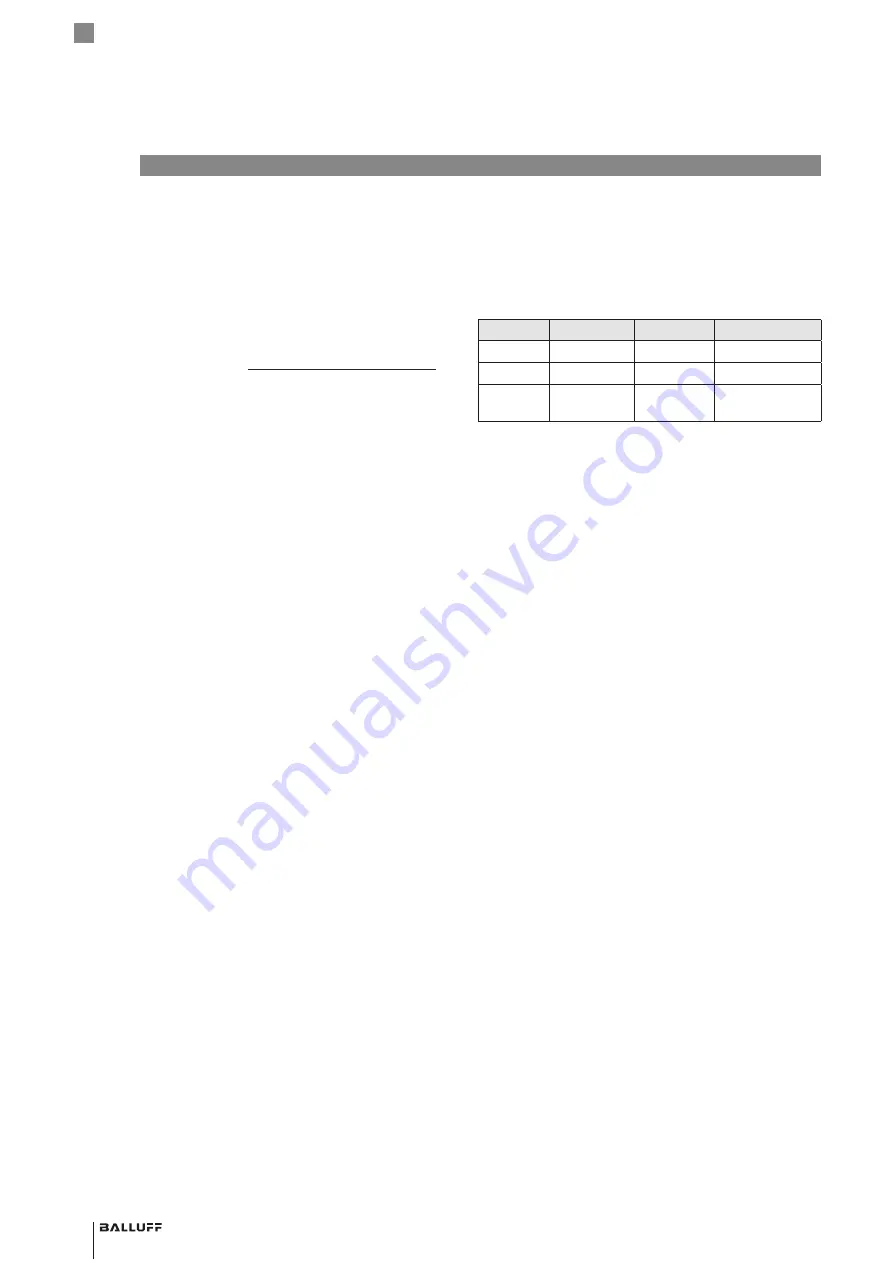
The services distinguish between Master Class 1-/Slave
functions (MSAC_C1) and Master Class 2-/Slave functions
(MSAC_C2). The services differ in having different distance
access points (SAP = Service Access Point).
Function Master SAP Slave SAP Services
MSAC_C1
51
51
Read, Write
MSAC_C2
50
49
Initiate request
MSAC_C2
50
0…48
Abort, Read,
Write
Tab. 4-6: Assignment of SAPs for acyclic data communication
DP-V1
The following services are implemented in the
magnetostrictive linear position sensor:
–
MSAC_C1
(Master-Slave acyclic communication, Class 1)
– Read data record from a slave (Read)
– Write slave data record (Write)
–
MSAC_C2
(Master-Slave acyclic communication, Class 2)
– Initiate (open connection to slave)
– Read data record from a slave (Read)
– Write slave data record (Write)
– Abort (close connection to a slave)
The SAPs assigned for DP-V1 are different for Class-1-
Master and Class-2 masters. The assignments of the
individual SAPs to the services are shown ion Tab. 4-6.
Since data exchange with MSAC_C1 communication is
monitored in cyclical data exchange, no connection
opening or closing using Initiate/Abort is necessary as is
the case with MSAC_C2 connections. Errors in cyclical
data communication also affect acyclic data
communication and vice-versa.
After a Class-1-Master has turned on extended mode in
the
Set_Prm-Telegram
, it can communicate with a slave
using SAP 51 in
Data_Exchange
. After
Leave_Master
SAP
51 is again disabled. Note that SAP 50 and SAP 51 are
not turned on until data exchange.
BTL7-T500-…
Configuration Guide
Summary of Contents for BTL7-T500 Series
Page 1: ...BTL7 T500 Konfigurationsanleitung deutsch ...
Page 2: ...www balluff com ...
Page 42: ...BTL7 T500 Configuration Guide english ...
Page 43: ...www balluff com ...