20
deutsch
4
Konfiguration (Fortsetzung)
4.7.9 Skalierung: Gesamter Messbereich
(Total measuring range in steps)
MIt diesem Parameter kann man angeben, in wie viele
Schritte die Nennlänge unterteilt werden soll. Daraus
errechnet das BTL7-T500… die nötige Schrittlänge.
Schrittlängen unter 1 µm sind kleiner als die Messauflö-
sung und daher nicht sinnvoll.
Auflösung (Schrittweite) =
Nennlänge
Messbereich in Messschritten
Dieser Parameter bestimmt indirekt den Parameter
Skalie-
rung: Messschritte pro Nennlänge
, daher sollte immer
mindestens einer der beiden Parameter auf Null gesetzt
sein. Werden sowohl
Skalierung: Messschritte pro Nenn-
länge
als auch
Skalierung: Gesamter Messbereich
gesetzt, dann hat
Skalierung: Gesamter Messbereich
die
höhere Priorität.
4.7.10 Tolerierte Anzahl Lebenszeichenfehler
(Max Master Sign-Of-Life failures)
Wenn die Lebenszeichenüberwachung in der Steuerung
aktiviert ist, dann wird bei jedem Telegramm ein Zähler
inkrementiert. Daran kann das BTL7 T500… erkennen, ob
es ein Telegramm verpasst hat. Mit diesem Parameter wird
eingestellt, ab welcher Fehlerzahl das Gerät einen Live-
Sign-Fault Fehler in G1XIST2 sendet.
4.7.11 Geschwindigkeitseinheit
(Velocity measuring unit)
Die Geschwindigkeit kann aus
Schritte/1000 ms
,
Schritte/100 ms
und
Schritte/10 ms
ausgewählt werden.
Dabei wird die Schrittgröße über die Parameter
Skalierung:
Messschritte pro Nennlänge
oder
Skalierung: Gesamter
Messbereich
festgelegt.
4.7.12 Diagnosezeit für FMM
Dieser Parameter ist nur bei den Modulen mit FMM ein-
stellbar.
Wenn sich im Flexible Magnet Mode (FMM) die Anzahl der
Positionsgeber ändert, dann wird eine Diagnose ausgege-
ben. Mit diesem Parameter kann die Zeit, in der die Diag-
nose ansteht bestimmt werden. Die Diagnosezeit in Millise-
kunden beträgt das Vierfache des eingestellten Werts.
Somit kann eine Zeit zwischen 4 ms und 1022 ms einge-
stellt werden. Eingaben unter 35 ms haben keine Auswir-
kungen, da das magnetostriktive Positionsmesssystem
diese Zeit benötigt, um einen neuen, gültigen Positionswert
auszugeben, nachdem sich die Anzahl der Positionsgeber
geändert hat (siehe Kapitel 4.6.1 auf Seite 17).
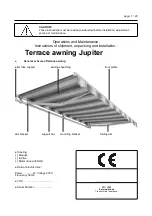
4.8
Dienste
Bei den Diensten unterscheidet man zwischen Master
Klasse 1-/Slave-Funktionen (MSAC_C1) und Master
Klasse 2-/Slave Funktionen (MSAC_C2). Die Dienste
werden durch verschiedene Dienstzugangspunkte
(SAP = Service Access Point) unterschieden.
Funktion Master-SAP Slave-SAP Dienste
MSAC_C1
51
51
Read, Write
MSAC_C2
50
49
Initiate request
MSAC_C2
50
0…48
Abort, Read,
Write
Tab. 4-6: Zuordnung der SAPs für den azyklischen Datenverkehr
DP-V1
Folgende Dienste sind im magnetostriktiven Positions-
messsystem implementiert:
–
MSAC_C1
(Master-Slave azyklische Kommunikation, Klasse 1)
– Datensatz eines Slaves lesen (Read)
– Datensatz eines Slaves schreiben (Write)
–
MSAC_C2
(Master-Slave azyklische Kommunikation, Klasse 2)
– Initiate (Verbindung zum Slave aufbauen)
– Datensatz eines Slaves lesen (Read)
– Datensatz eines Slaves schreiben (Write)
– Abort (Verbindung zum Slave aufheben)
Die für DP-V1 zugeordneten SAPs sind für Klasse-1-
Master und Klasse-2-Master verschieden. In Tab. 4-6 sind
die Zuordnungen der einzelnen SAPs zu den Diensten
aufgezeigt.
Da der Datenverkehr bei der MSAC_C1-Kommunikation im
zyklischen Datenverkehr überwacht wird, ist kein
Verbindungsaufbau/-abbau über Initiate/Abort notwendig,
wie dies bei MSAC_C2-Verbindungen der Fall ist. Fehler im
zyklischen Datenverkehr wirken sich auch auf den azykli-
schen Datenverkehr aus und umgekehrt.
Nachdem ein Klasse-1-Master im
Set_Prm-Telegramm
den erweiterten Mode eingeschaltet hat, kann er im
Data_
Exchange
über den SAP 51 mit einem Slave kommunizie-
ren. Nach
Leave_Master
ist der SAP 51 wieder deaktiviert.
Es ist zu beachten, dass SAP 50 und 51 erst im Datenaus-
tausch freigegeben werden.
BTL7-T500-…
Konfigurationsanleitung
Summary of Contents for BTL7-T500 Series
Page 1: ...BTL7 T500 Konfigurationsanleitung deutsch ...
Page 2: ...www balluff com ...
Page 42: ...BTL7 T500 Configuration Guide english ...
Page 43: ...www balluff com ...