www.balluff.com
13
english
6
P interface
6.1
Principle
The P interface is a universal impulse interface and unifies
the functions of the falling and rising edges. The system
control is done via Init and start/stop signals. Here, the
start pulse is the reference point for the travel time
measurement.
Reliable signal transmission, even with cable lengths of up
to 500 m between the evaluation unit and the BTL is
ensured by the particularly fail-safe RS485 differential driver
and receiver. Interfering signals are effectively suppressed.
DPI/IP is a protocol for direct data exchange between the
controller and the BTL. Here, the signal lines transmit
additional information, such as manufacturer, type code,
measuring length, and waveguide velocity. This makes it
possible to start up or exchange a BTL without needing to
manually change the control parameters.
The interface enables bi-directional communication and
includes integrated diagnostic functions. Downtimes are
reduced thanks to Plug & Play and automatic
parameterization.
6.2
DPI/IP method
6.2.1 Function and characteristics
The DPI/IP method includes two operating modes, DPI
measuring operation and operation with the IP data
protocol.
DPI = digital pulse interface
IP = integrated protocol
DPI measuring operation
The Init pulse is sent to the BTL via the Init line at regular
intervals, its rising edge triggers a measurement.
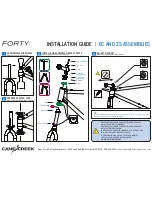
Fig. 6-1:
Start
T
Init
T
Stop
T
Init
Start/Stop
Principle of data transfer in DPI measuring operation
T
Init
1 μs to 5 μs
T
Start
3 μs to 5 μs (typ. 4 µs)
T
Stop
3 μs to 5 μs (typ. 4 µs)
Operation with IP data protocol
If the length of the Init pulse T
IP
is extended to 10 μs to
50 μs, the BTL switches from DPI measuring mode to
operation with the IP data protocol (see Fig. 6-1).
Here, a character string (command) is transferred to the
BTL after the Init pulse. While the start pulse is still sent by
the BTL as a response on the start/stop line, a character
string (response) is transferred to the controller instead of
the stop pulses, which contains the requested response
dependent on the command.
Each character in the transfer protocol has the following bit
structure:
…
Start Bit0 Bit1 Bit2
Bit6 Bit7 PBit Stop
Bit
T
Start bit
Start-of-frame bit
Bit 0...bit 7
8 data bits
PBit
Parity bit (even parity)
Stop
Stop-of-frame bit
T
Bit
4 μs (bit length at a data rate of 250 kbit/s)
Data security during transfer of the string is achieved with
the parity and CRC16 checks with polynomial
X16+X12+X5+1 (corresponds to 0x1021). If there is a
transfer or protocol error, the BTL sends an appropriate
error message as the response.
Fig. 6-2:
T
D1
Command
Response
T
IP
Start
T
Init
Start/Stop
…
…
Principle of data transfer with the IP data protocol
T
IP
10 μs to 50 μs
Operation with IP data protocol
Command
Command to request BTL data
(information that is stored in the BTL)
T
Start
3 μs to 5 μs (typ. 4 µs)
T
D1
> 50 μs
Response
Response in line with the request
Alternative: error message
BTL7-P511-M _ _ _ _ -T _ 2/3-S32/KA _ _ /FA _ _
Magnetostrictive Linear Position Sensor – Rod Style
Summary of Contents for BTL7-P511-M Series
Page 2: ...www balluff com...
Page 4: ...www balluff com...
Page 24: ......
Page 26: ...www balluff com...
Page 46: ......
Page 48: ...www balluff com...
Page 68: ......
Page 70: ...www balluff com...
Page 90: ......
Page 92: ...www balluff com...