www.balluff.com
13
6
Interfaces
6.1
Señales de las interfaces
La cabeza del sensor transforma las señales de seno y
coseno de los sensores incrementales en impulsos A/B
digitales y los transfiere al control.
6.1.1 Sistema de medición incremental digital
El sensor transfiere la magnitud de medición como señal
de tensión diferencial (RS422) o como nivel de tensión de
servicio (HTL) al control (según variante).
La distancia entre flancos A/B se corresponde con la
resolución de la cabeza del sensor.
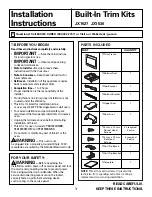
Fig. 6-1:
A
B
Z
Señales de salida digitales con un movimiento de avance
Los impulsos A/B digitales son interpolados en la cabeza
del sensor. Los dos impulsos digitales A y B tienen un
desplazamiento eléctrico de fase de 90°; el signo del
desplazamiento de fase depende del sentido del
movimiento del sensor (Fig. 6-2).
Cada cambio de flanco de A o B es interpretado por el
contador de periodos (contador up/down) como un paso
del contador. Si la señal A avanza, el valor indicado por el
contador aumenta, pero si es la señal B la que avanza,
entonces disminuye. Esto permite al control conocer en
todo momento la posición incremental exacta sin tener
que consultarla regularmente con el sensor (funcionalidad
de tiempo real). La posición de la señal Z puede ser
distinta (Q1-Q4, véase Fig. 6-1). Sin embargo, siempre se
encuentra en la posición correcta físicamente y siempre
mide un incremento de anchura.
Nota:
Para un funcionamiento correcto, es necesario
evaluar la señal A y B en función del sentido.
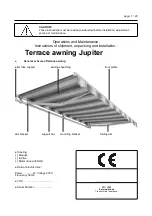
Fig. 6-2:
Señal A
Señal B
Hacia delante
Hacia atrás
Incremento
Valor del
contador
Sentido de
movimiento
Señales de salida BML con contador de periodos
Periodo de señal 360° el.
Distancia entre flancos
Impulso de
referencia
Q1
Q2
Q3
Q4
Fig. 6-3: Circuito de electrónica secuencial (RS422)
Fig. 6-4:
A, B, Z,
Nerror
4k7
74C14
5.1 V
C
Circuito de electrónica secuencial (HTL)
en BML-S…-Q53…
6.1.2 Circuito para la posición de referencia
En función del modelo, el sensor transmite las siguientes
señales:
– Ninguna señal de referencia
– Una señal de referencia de polos periódicos (periodo =
10 mm, anchura de la señal de referencia = distancia
entre flancos, Fig. 6-1). Si se deben transferir varias
señales de referencia, se debe montar un interruptor
selector externo en la señal de punto de referencia
deseada.
Fig. 6-5:
Interruptor selector
externo
Cabeza del sensor PLC
Señal de
referencia para el
control
Circuito de la posición de referencia
Canal A
Cabeza del
sensor
PLC
p. ej.
IC 26C32
Cabeza del sensor
BML-S2C0-Q _ _ _ -M6 _ _ - _ 0-KA _ _ /KF _ _ /KA _ _-S284
Sistema de medición de desplazamiento incremental de codificación magnética
español
Summary of Contents for BML-S2C0-Q Series
Page 2: ...www balluff com...
Page 23: ...www balluff com...
Page 44: ...www balluff com...
Page 65: ...www balluff com...
Page 86: ...www balluff com...