










Page:4
ESC32 2r1 user manual - version 0.0
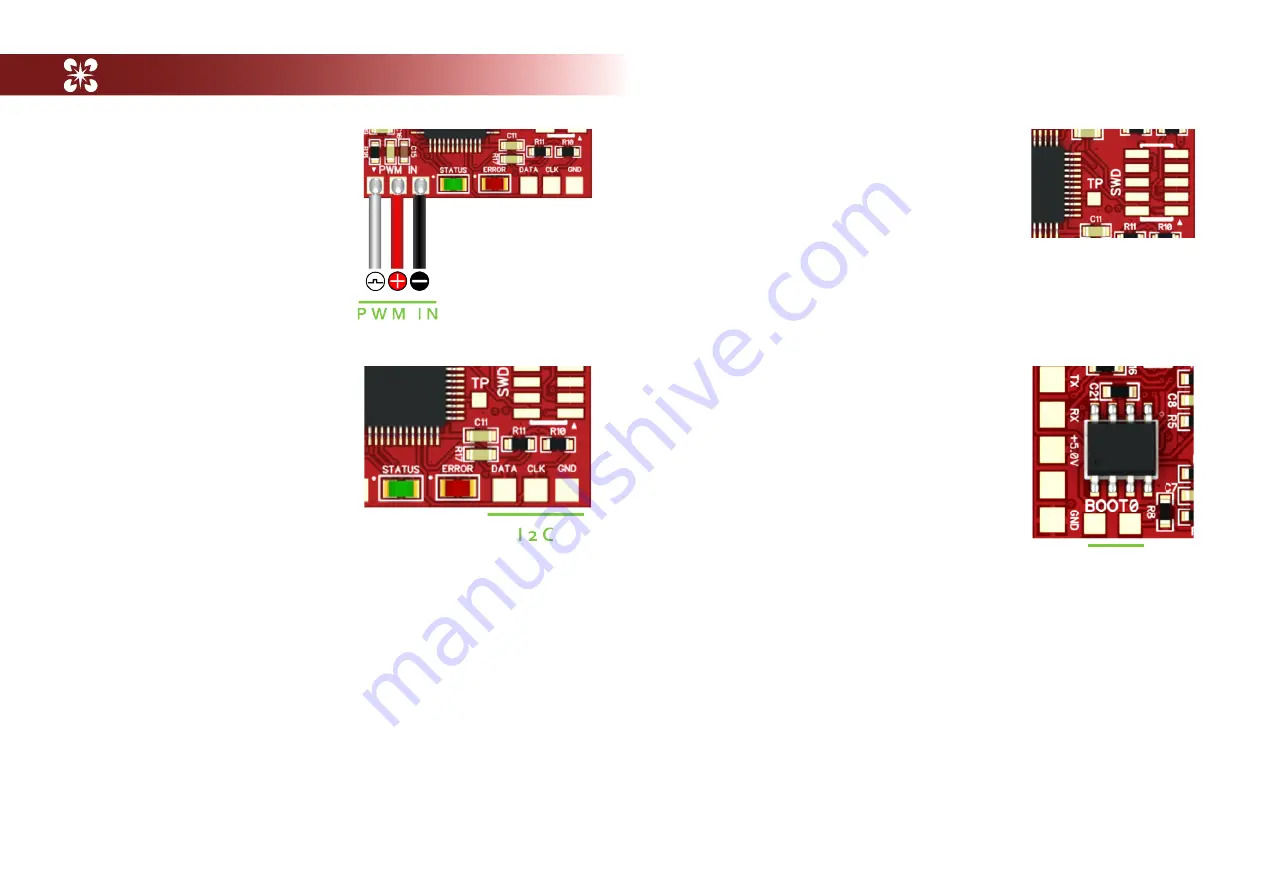
1.4 PWM connection
Solder the PWM servo wire to the
PWM pads or add header pins.
1.5 I2C connection
The ESC32 offers a I2C bus connection
for future use. Support for MK I2C
control will be released as soon as
we had a chance to test it properly -
talented people are working on this - a
beta release is expected soon!
1.6 CAN-connection (Optional)
ESC32 can be fitted with an optional CAN transceiver (Texas Instruments
SNHVD232) to provide CAN-bus control and bidirectional communication at
up to 1Mbit/s. Currently CAN is not supported in the Firmware. It is also a
work in progress, and we will release a driver for it when we had more time
to implement and test CAN control.
1.7 Cortex SWD connection. (J4)
A standard 10-pin SMT Cortex (TM) SWD connector
(Samtec FTSH-105-01-F-DV) can be soldered to the
board for realtime debugging of ESC32.
1.8 Boot jumper
The boot jumper is used to place the STM32
bootloader in flash mode for uploading new
firmware. Short these two pads during power-up
to activate the Bootloader and place ESC32 in flash
mode (Hint: you can use a pair of tweezers, if you
are bit handy - you don´t need to keep the pads
shortened after the ESC has been powered up)





















































