





























Autopilot Installation Manual
5.3
Cascade Controller
2. Overshoot.
3. Steady-state error - remaining error.
4. Response time - 90% of reference step.
5. Oscillations.
5.3
Cascade Controller
The main problem of the aircraft control is the fact that the aircraft is a
complex process. We have to control at least elevator and ailerons. For each
one we are using a cascade control system.
A cascade control involves the use of two controllers. The output of the first
controller provides the reference for the second controller.
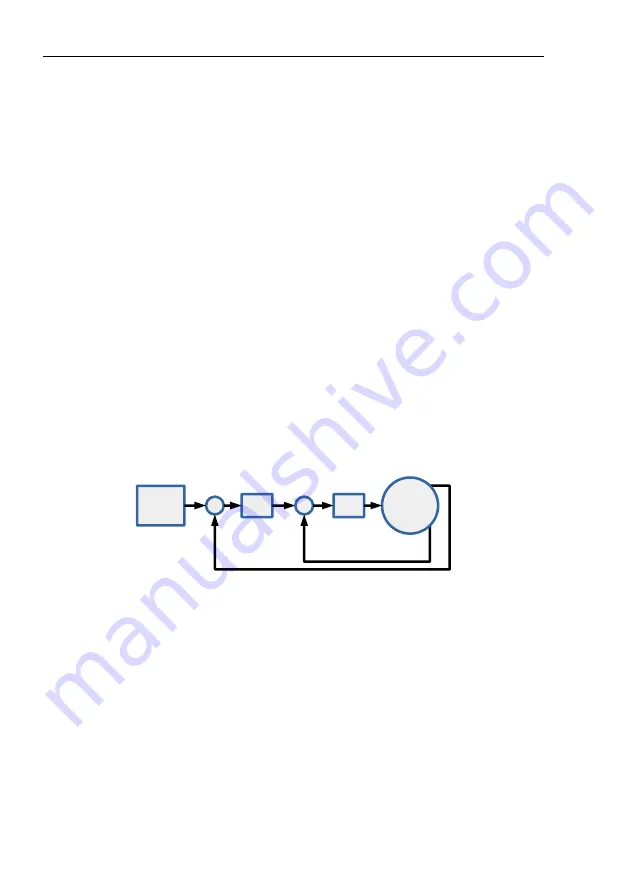
The example of cascade PID controller for an elevator is shown on figure 15.
Note that there are two feedback loops and two controllers. Inner controller
is controlling pitch of the aircraft and outer is controlling its vertical speed.
PID
+
Reference
Vertical
Speed
PID
+
Elevator
Aircraft
-
-
Pitch
Vertical
Speed
Figure 15:
Elevator cascade
PID
controller block diagram.
The important fact of this system is that outer loop response depends on the
performance of the inner control loop. This means that inner control must be
tuned first and the response of the inside loop must be good enough.
5.4
Controller Problems
The
PID
controller is very robust but sometimes the tuning does not provide
any usable results. There are two major problems which influence the control
loop behavior: mechanical backlash and motor slip.
28
©
Kanardia
2016-2020





















































