























9
Copyright (C) 2020-2021 Reserved by ASIX Electronics Corporation, All Rights Reserved.
AX58200
Motor Control User Guide
Reference Design User Guide
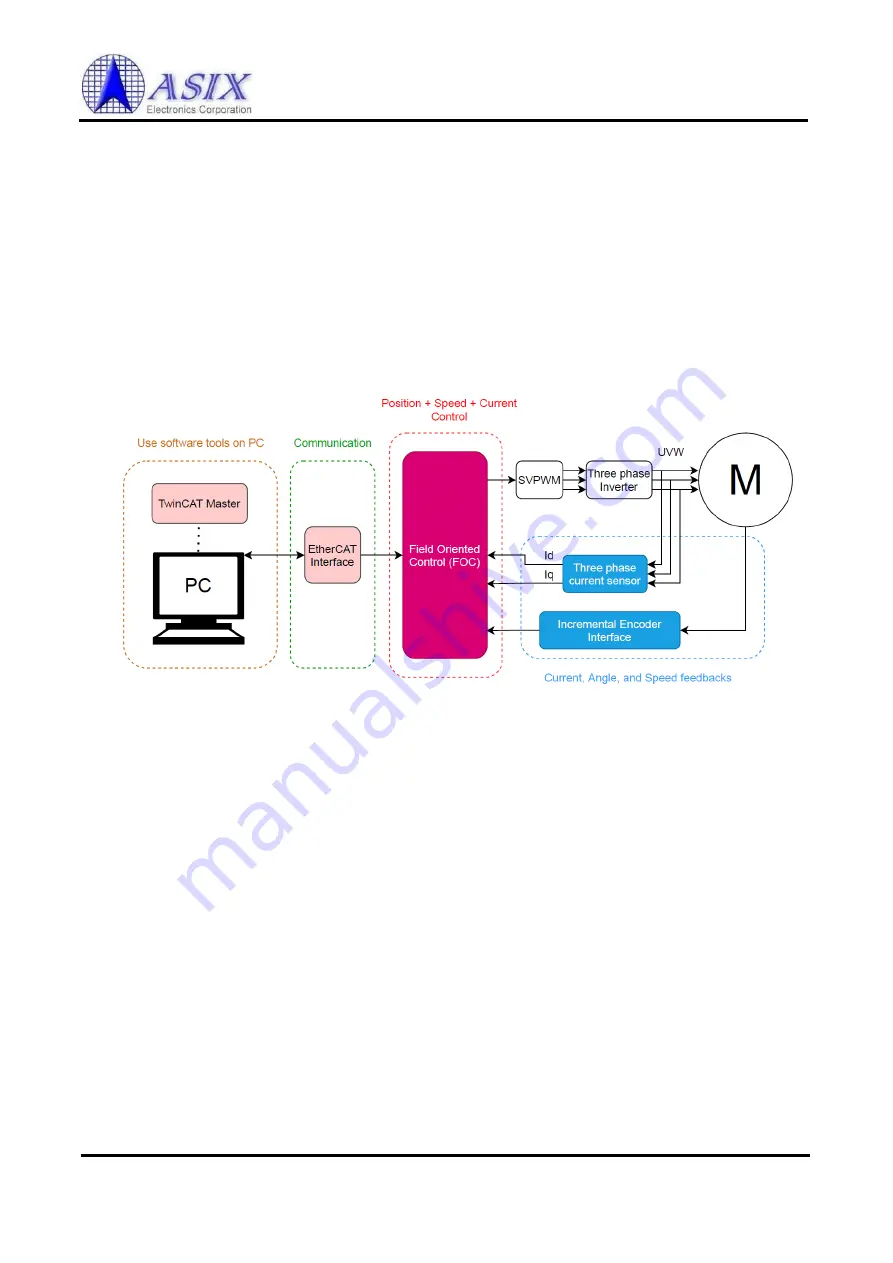
1-1 Introduce Block Diagram of System
The following figure is a simple servo drive block diagram. The software used on the PC side is
“
TwinCAT
XAE
”. The communication connection method is to connect to the AX58200-TSB through a network cable. In
terms of usage, TwinCAT XAE is biased towards demonstration.
Different from the previous version is that the motor control theory uses FOC and three-loop PI controller, the
three loops are position loop, speed loop, and current loop. General position loop with current loop or speed
loop with current loop can only be used for constant position or constant speed. The three-loop controller can
achieve the simultaneous constant position and constant speed requirements.
Motors have many interfaces for detecting rotor angle and speed. For example, relative encoder, absolute
encoder, hall sensor... etc. This article is a simple servo drive and only supports incremental encoder
interface.
Figure 1 - 2
⚫
Use software tools on PC:
TwinCAT XAE.
⚫
Communication:
EtherCAT.
⚫
Motor Control Theory:
FOC control and three-loop PI controller.
⚫
Feedback Interface:
1. Three phase current sensor.
2. Incremental encoder.





















































