





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
Networked Indexer/Driver User Manual
C
OMMAND
M
ODE
D
ATA
F
ORMAT
71
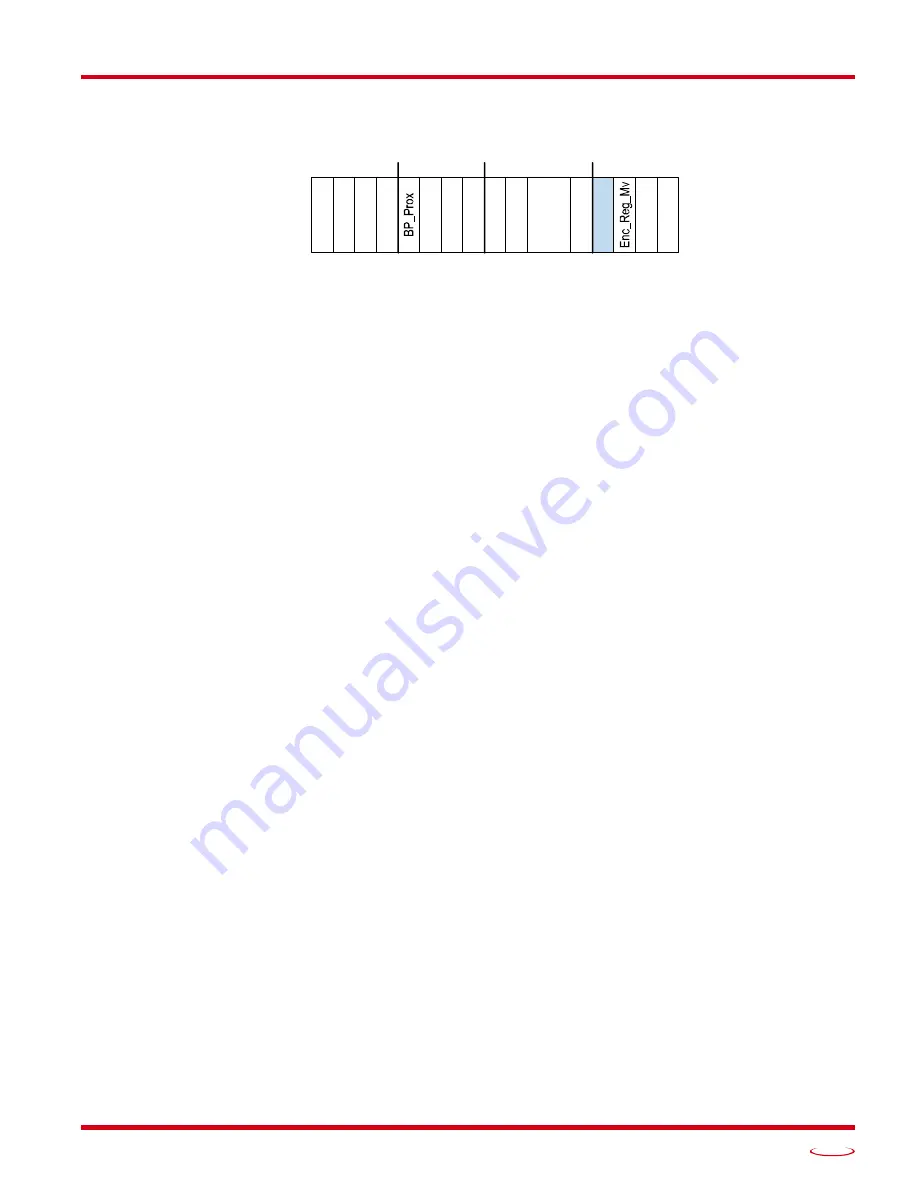
Command Word 1
Figure R7.3 Command Word 1 Format
Bit 15: Enable_Driver –
“0” to disable the motor current, “1” to enable motor current. A valid configura-
tion must be written to the Networked Driver before the driver can be enabled.
Bit 14: Virtual_Encoder_Follower –
When using the Networked Driver as an axis follower, set this bit to
‘1’ to close the position loop with respect to the encoder position. This bit is only available when the
unit is configured to use encoder feedback. This bit must equal ‘0’ if the Virtual_Position_Follower
bit, bit 12 of this word, is set to ‘1’.
Bit 13: OUT1_Set_State –
When the output is configured as a general purpose output point instead of the
Fault Output, this bit controls the state of the output. When this bit equals a “1”, the output is on and
conducts current.
Bit 12: Virtual_Position_Follower –
When using the networked Driver as an axis follower, set this bit to ‘1’
to close the position loop with respect to the motor position. This bit must equal ‘0’ if the
Virtual_Encoder_Follower bit, bit 14 of this word, is set to ‘1’.
Bit 11: Backplace_Proximity_Bit –
When the Networked Driver is configured to use the
Backplace_Proximity_Bit, the unit will ignore the state of the Home Input as long as this bit equals
“0”. This bit must equal “1” before a transition on the Home Input can be used to home the machine.
Further information on using the Backplace_Proximity_Bit can be found in the
section found on page 57.
Bit 10: Clear_Driver_Fault –
If this bit is set when a Reset Errors Command is issued, (Command Word 0
Bit 10) the Networked Driver will attempt to clear driver errors such as a missing interlock jumper or
motor short fault. Note that the driver must be disabled (Command Word 1, Bit 15 = 0), when using
this command.
Bit 9:
Assembled_Move_Type –
When this bit equals “0”, a Blend Move is started when the Run Assem-
bled Move bit, (Command Word 1, Bit 13) makes a 0
1 transition. When this bit equals “1”, a
Dwell Move is started on the transition. The direction of a Blend Move is controlled by the
Reverse_Blend_Direction bit, (Command Word 1, Bit 4). In a Dwell Move, the Dwell Time between
segments is programmed in Word 9 of the command data.
Bit 8: Indexed_Command –
If this bit is set when a move command is issued, the Networked Driver will
not run the move immediately, but will instead wait for an inactive-to-active transition on an input
configured as a
Start Indexer Move
input.
Bit 7:
Registration_Move –
When this bit equals “0”, and a Jog Move command is issued, it will run as a
standard Jog Move. When this bit equals “1” and a Jog Move command is issued, the move will run
as a Registration Move.
Bit 6: Enable_Electronic_Gearing –
Set to “1” to put the Networked Driver in Electronic Gearing mode.
Set to “0” for normal operation. A full description of Electronic Gearing mode starts on page 23.
Bit 5: Save_Assembled_to_Flash -
Set this bit to save the data of a programmed Assembled Move. This bit
is only acted upon this way when the Program_Assembled bit (Command Word 0, Bit 11 makes a 1
0
transition as explained in the
section of this manual starting on page
OR
Motor_Current_Key2 -
See
Description of Motor Current Keys
on the following page.
15 14 13 12 11 10 09 08 07 06
05 04 03 02 01 00
Command Word 1
En
_D
riv
er
V_
En
c_
Fo
llo
w
O
U
T1_S
ta
te
V_
Po
s_
Fo
llo
w
En_
El
G
ear
R
eg
_M
ov
e
Inde
x_
Cm
d
AsM
v_
Ty
pe
C
lr_
D
rv
_F
lt
R
ev
_B
le
nd
Di
r
Cur
re
nt
_K
ey
0
Cur
re
nt
_K
ey
1
0
Sv
A_
to
_F
la
sh
or
Cur
ent
_K
ey
2







































































