





























Chapter 4
Geometries with orientation support
154
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
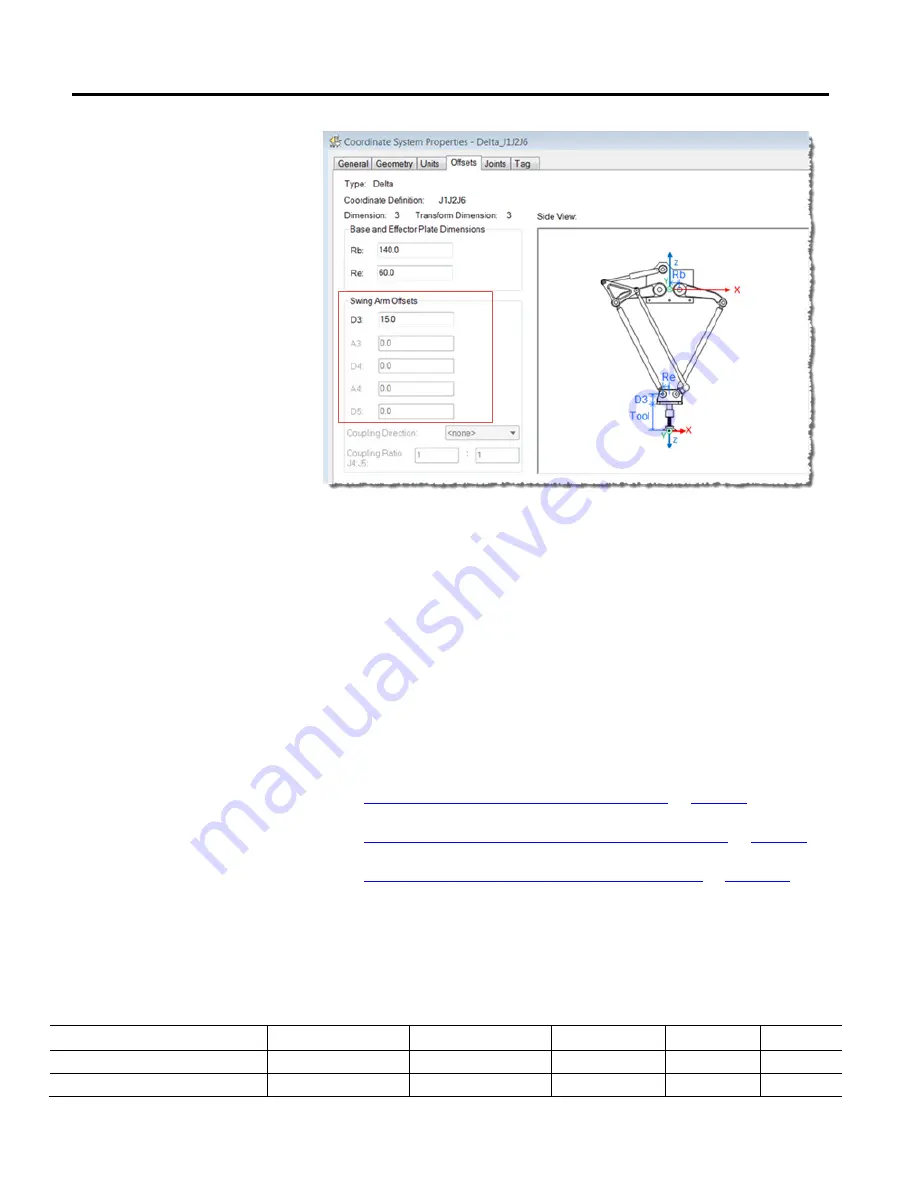
Denavit - Hartenberg (DH) notation is used to configure the offset values. Use
XYZ axis directions, shown in the image at end plate center point, as a reference
frame to measure the offset values. As per DH convention, Offset values are
positive or negative based on XYZ reference frames shown here.
Tip:
For all Swing Arm offsets, positive Z direction is pointing down at the End plate center point.
Refer to the manufacturer’s CAD drawings or datasheet to find relevant Swing
Arm Offset values for the robot. Some offset values will be zero based on the
mechanical setup.
See also
Configuration parameters for Delta J1J2J6 robot
Configure Zero Angle Orientations for Delta J1J2J6 robot
Configuring offset variables in a GSV/SSV instruction
The
Offset
parameters in the
Coordinate System Properties
dialog box for the
3-axis Delta robot are not mapped to the attributes of the same name in the
GSV/SSV instruction. Use the table to associate the parameters in the
Coordinate System Properties
dialog box to the attributes in the GSV/SSV
instruction.
Parameter in Coordinate System dialog box Class name
Attribute name
Data type
GSV
SSV
Base Plate dimension: Rb
CoordinateSystem
BaseOffset1
REAL
Yes
Yes
Base Plate dimension: Re
CoordinateSystem
EndEffectorOffset1
REAL
Yes
Yes
Configuring offset variables in a
GSV/SSV instruction