


















UG 20-UG 25-OI-vers. 3.2 gb. 06.08.14.doc
23
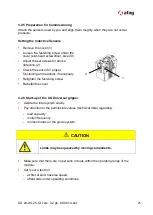
3.2.8 Example of application of sensor technology combined with specially
formed grip fingers (depending on application):
Position of grippers
Description
Gripper closed
The grip fingers (1) contact each other.
This position is usually queried by a magnetic sensor.
Part (2) correctly gripped
Depending on size and form of the part this position is
queried by magnetic or inductive sensors. To guarantee
highest precision this position is queried by two inductive
sensors. These are set in such a way that one sensor
responds and the second one does not respond. Through this
combination it is possible to detect whether a part was
correctly gripped.
Part not correctly gripped
In this position all sensors do not respond if the grip fingers
are properly designed.
Gripper open
This position is usually queried by a magnetic sensor.
HINWEIS
Depending on the form of parts and fingers an optimum operational
safety can also be achieved by alternative sensor evaluations.
1
2
Summary of Contents for 50030771
Page 14: ...14 UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 3 1 8 Dimensions drawing UG 20 ...
Page 15: ...UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 15 3 1 9 Technical data of the UG 20 ...
Page 16: ...16 UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 3 2 0 Preferred combinations UG 20 ...
Page 17: ...UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 17 3 2 1 Dimensions drawing UG 25 ...
Page 18: ...18 UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 3 2 2 Technical data of the UG 25 ...
Page 19: ...UG 20 UG 25 OI vers 3 2 gb 06 08 14 doc 19 3 2 3 Preferred combinations UG 25 ...