





























2.5.2. End of Travel Limit Input Interface
Aerotech strongly recommends that you use End of Travel (EOT) limits to define the end of the physical
travel. Current-based limits that are software-selectable through the EndOfTravelLimitSetup axis
parameter can be used, but only if EOT limits are not available on your galvo motor. Positive or clockwise
motion is stopped by the clockwise (CW) end of travel limit input. Negative or counterclockwise motion is
stopped by the counterclockwise (CCW) end of travel limit input. The Home Limit switch can be
parameter configured for use during the home cycle, however, the CW or CCW EOT limit is typically used
instead. All of the end-of-travel limit inputs accept 0-5 VDC level signals. Limit directions are relative to
the encoder polarity in the diagnostics display (refer to
).
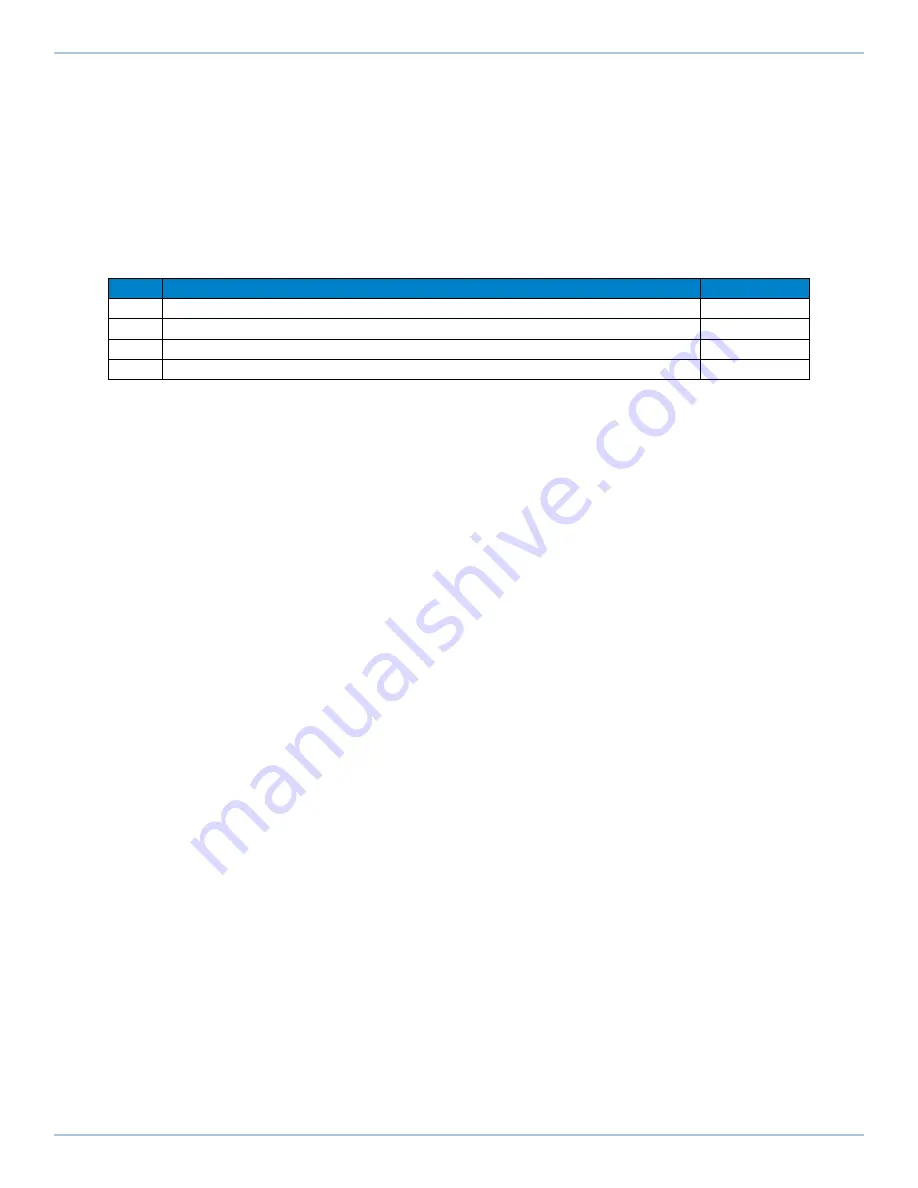
Table 2-20:
End of Travel Limit Input Pins on the Galvo Motor Connectors
Pin
Description
In/Out/Bi
6
Clockwise End of Travel Limit
Input
8
Encoder Power (+5V, 500 mA)
N/A
16
Encoder Ground
N/A
19
Counterclockwise End of Travel Limit
Input
Aerotech recommends that you use a normally-closed limit switch and select Active High for this option.
This configuration provides fail-safe limit behavior because the controller generates a fault if the external
hardware is not connected or is not operating correctly. If you connect a normally-closed limit switch
between the limit input and limit common and the switch is not activated, it stays closed and the limit
inputs are pulled low by the limit switch. When the switch is activated, it opens and the limit input is
pulled high by the circuit inside the drive.
The active state of the EOT limits is software selectable (by the EndOfTravelLimitSetup axis parameter).
shows the possible wiring configurations for normally-open and normally-closed switches
and the parameter setting to use for each configuration.
2.5.2. End of Travel Limit Input Interface
GL4 Hardware Manual
40
www.aerotech.com







































































