





























Note: Considering that total load capacity of 16Pin IO wire is 500mA, it is advised to use
IO signals of IO board (ADT-9137, ADT-9125).
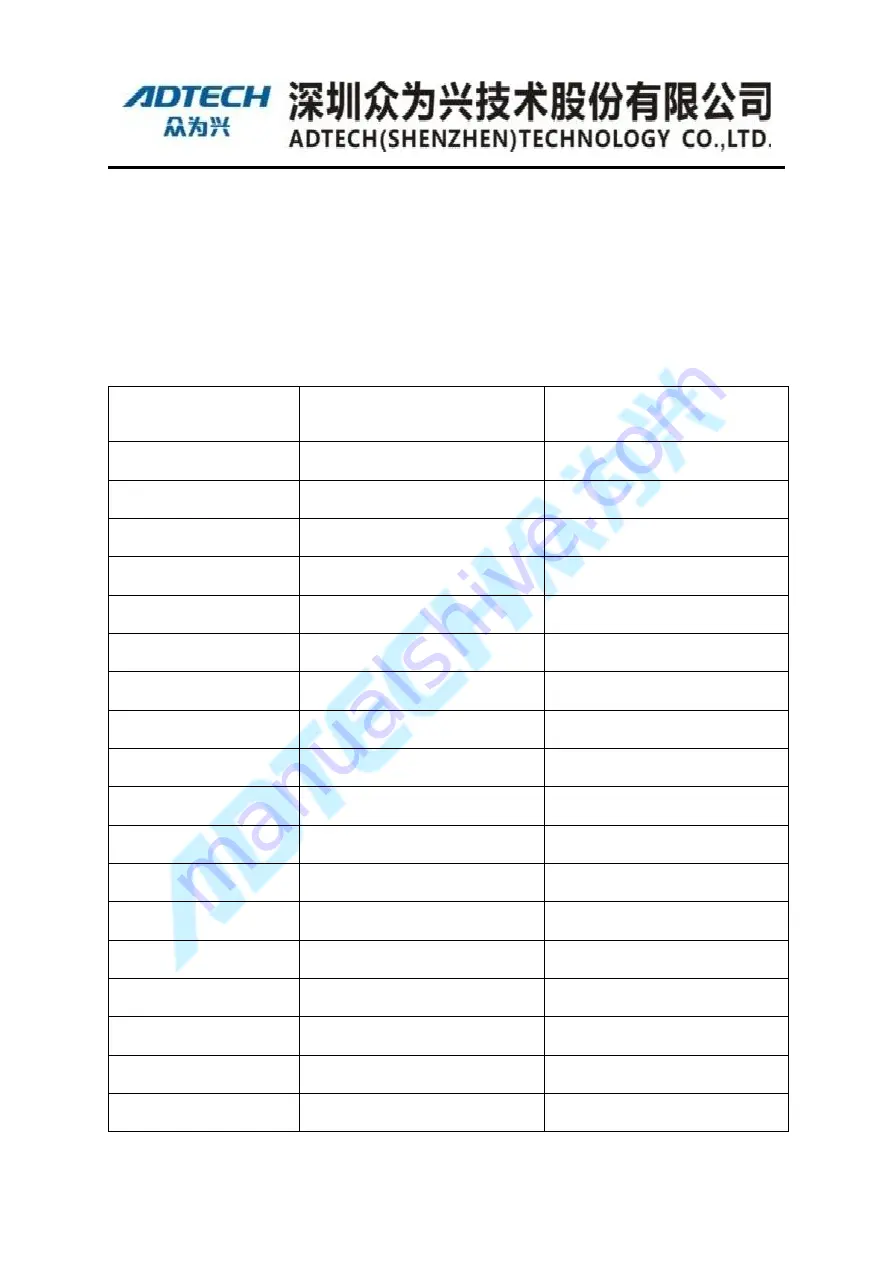
Table 4-4-6 Definitions of 20Pin twisted pair
Definition
Number of 48Pin connector
Shielding twisted pair of 20Pin
(
color of each wire
)
(
color of each wire
)
Relay1 (OUT23)
C1
GrayRed
Relay2(OUT24)
C2
GrayBlack
Relay3
(
OUT25
)
C3
WhiteRed
Relay4
(
OUT26
)
C4
WhiteBlack
OUT19
C5
OrangeRed
OUT20
C6
OrangeBlack
OUT21
D1
PinkRed
OUT22
E5
PinkBlack
IN28
D2
YellowRed
IN29
D3
YellowBlack
IN30
D4
GrayRedRed
IN31
E6
GrayBlackBlack
IN32
F5
WhiteRedRed
IN33
F6
WhiteBlackBlack
Internal 24V power
D5
OrangeRedRed
GND
D6
OrangeBlackBlack
Internal 24V power
G5
PinkRedRed
Internal 24V power
G6
PinkBlackBlack







































































