





























Motion Control Theory
111
AMP-204C / AMP-208C
Coordinates of end point may have certain error caused by
computing accuracy of your computer. To get precise end point
position, you may use method 2 to enter exact end position
accurately (as described in next section)
¾
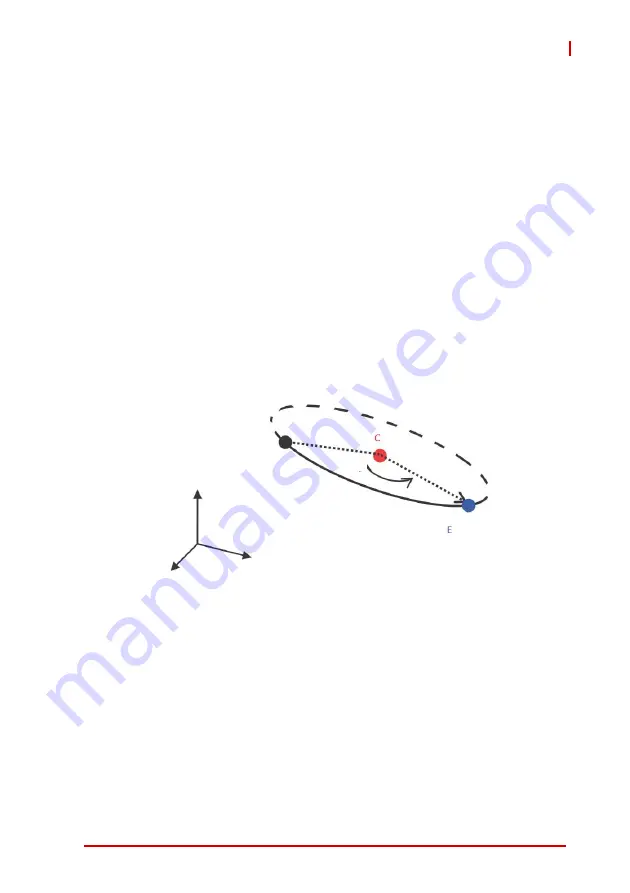
method 2: given center of circle and end point
This method requires center of circle and position of end point
only. Benefit of this method lies in that it does not need a normal
vector and that it can have accurate ending position to meet
demands from contour or applications that need accurate
positioning. This method has two restrictions:
1. It cannot execute half circle (angle of 180 degree)
2. It cannot execute full circle (angle of 360 degree)
Figure 4-30: Three dimension arc interpolation (method 2)
• How to determine direction of arc
Use the right-hand grip rule as shown in figure below, where the
your thumb indicates normal vector direction and the other four
fingers the positive rotating direction.
Use parameter ”I16 Dir” to determine direction, if Dir>= 0 then
rotate in positive direction and negative direction if DIR <= -1
• Path of multiple laps (arcs of angle greater than 360 degree)
Use parameter ”I16 Dir” to determine rotating angle with formula
described below:
Angle =
θ
+ Dir * 2PI
S
Summary of Contents for AMP-204C
Page 8: ...viii Contents ...
Page 12: ...xii List of Figures ...
Page 14: ...xiv List of Tables ...
Page 52: ...38 Getting Start with The Installation ...
Page 71: ...Signal Connection 57 AMP 204C AMP 208C Signal connection diagram ...
Page 72: ...58 Signal Connection Figure 3 13 General purpose digital I O signal connection example ...







































































