



























1
4
2
3
(
) (
)
2
T
T
T
T
t
+
-
+
D =
EQUATION1359 V1 EN
(Equation 3)
Δt is calculated every time a telegram is received, and the time difference is then used
to adjust and interpolate the current measurements from the remote end before the
current differential algorithm is executed.
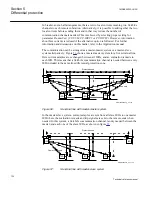
The echo method without GPS, can be used in telecommunications transmission
networks with varying signal propagation delay as long as there is delay symmetry,
that is, the send and receive delays are equal. The delay variation can depend on the
signal going different routes in the network from time to other.
When the delay symmetry is lost, the expression for Δt given above is no longer valid,
and GPS synchronization of the local IED clocks must be used.
Including the optional GPS, means that there will be one GPS receiver module in each
IED, synchronizing its local IED clock. As GPS synchronization is very accurate, in
the order of 1 μs, all IEDs in the same line differential scheme will have the same clock
reference. It is then possible to detect asymmetric transmission time delay and
compensate for it.
When the IED is equipped with GPS, this hardware is integrated in the IED. Besides
the GPS receiver itself, it also consists of filters and regulators for post processing of
the GPS time synch pulse, which is necessary to achieve a reliable GPS
synchronization. Especially short interruptions and spurious out of synch GPS signals
are handled securely in this way.
When GPS synchronization is used, an interruption in the GPS signal leads to
freewheeling during 8 seconds that is, during this time the synchronization benefits
from the stability in the local clocks. If the interruption persists more than 8 seconds,
either fall back to the echo synchronization method or blocking of Line differential
protection function is made, as selected through setting parameter
GPSSyncErr
.
For a description of the time synchronization function, refer to section
5.1.2.3
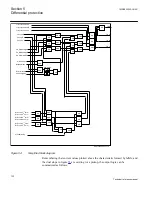
Analog signal communication for line differential protection
Communication principle
For a two-terminal line, the current from the local CT needs to be communicated over a
64 kbit/s channel to the remote line end, and the remote end current communicated
back on the same channel. If there is, for example, a three terminal line another 64 kbit/
s channel will be needed to exchange the same local current with the third line end current.
1MRK505222-UUS C
Section 5
Differential protection
135
Technical reference manual
Summary of Contents for Relion 670 series
Page 1: ...Relion 670 series Line differential protection RED670 ANSI Technical reference manual...
Page 2: ......
Page 40: ...34...
Page 50: ...44...
Page 60: ...54...
Page 126: ...120...
Page 384: ...378...
Page 496: ...490...
Page 556: ...550...
Page 602: ...596...
Page 620: ...614...
Page 794: ...788...
Page 864: ...858...
Page 988: ...982...
Page 998: ...992...
Page 1084: ...1078...
Page 1164: ...1158...
Page 1168: ...1162...
Page 1220: ...1214...
Page 1230: ...1224...
Page 1231: ...1225...





































































