





























5.2 Synchronization marks and axis movement directions
5.2.1 Synchronization marks and synchronization position for axes
Introduction
This section shows the position of the synchronization marks and the
synchronization position for each axis.
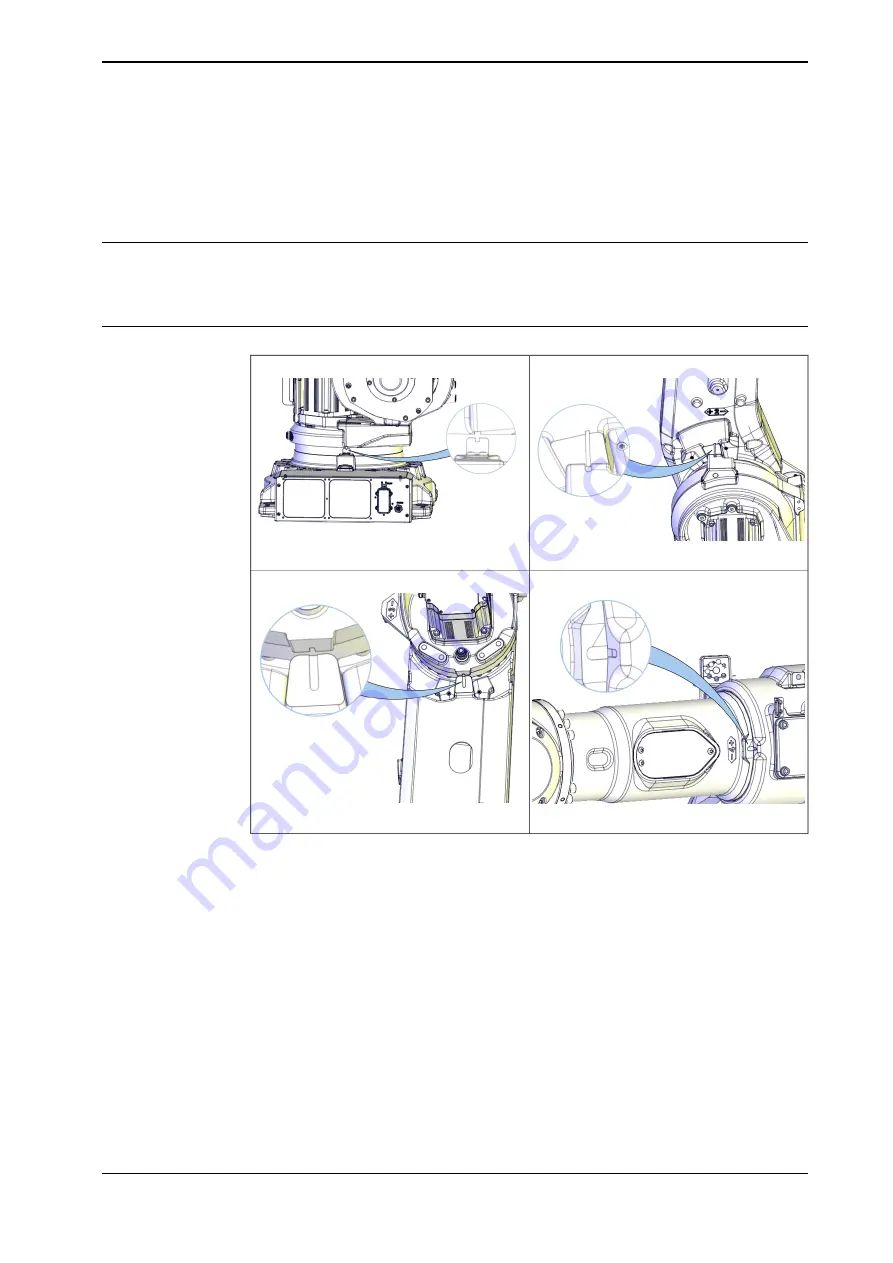
Synchronization marks, IRB 6700
Axis 2
xx1300000869
Axis 1
xx1300000868
Axis 4
xx1300000871
Axis 3
xx1300000870
Continues on next page
Product manual - IRB 6700
791
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
5 Calibration
5.2.1 Synchronization marks and synchronization position for axes
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......


































































