




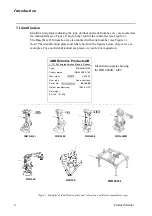

























Description
Product Specification IRB 6400R M99/BaseWare OS 3.2
7
Restricting the working space
The movement of each axis can be restricted using software limits. Axes 1-3 can also
be restricted by means of mechanical stops.
Hold-to-run control
“Hold-to-run” means that you must depress the start button in order to move the robot. When
the button is released the robot will stop. The hold-to-run function makes program testing
safer.
Fire safety
Both the manipulator and control system comply with UL’s (Underwriters Laboratory)
tough requirements for fire safety.
Safety lamp
As an option, the robot can be equipped with a safety lamp mounted on the manipula-
tor. This is activated when the motors are in the MOTORS ON state.
2.3 Operation
All operations and programming can be carried out using the portable teach pendant
(see Figure 3) and the operator’s panel (see Figure 5).
Figure 3 The teach pendant is equipped with a large display, which displays prompts,
information, error messages and other information in plain English.
Information is presented on a display using windows, pull-down menus, dialogs and
function keys. No previous programming or computer experience is required to learn
how to operate the robot. All operations can be carried out from the teach pendant,
which means that an additional keyboard is not required. All information, including the
complete programming language, is in English or, if preferred, some other major
language. (For a list of languages, see Product Specification RobotWare).
2
1
2
3
0
1
4
5
6
7
8
9
P3
P1
P2
Joystick
Display
Emergency
stop button
Summary of Contents for IRB 6400R
Page 4: ...Description 20 Product Specification IRB 1400 M97A BaseWare OS 3 0 ...
Page 6: ...Introduction 2 Product Manual ...
Page 10: ...Introduction 6 Product Manual ...
Page 12: ...Product Specification IRB 6400R 2 Product Specification IRB 6400R M99 BaseWare OS 3 2 ...
Page 78: ...Accessories 68 Product Specification IRB 6400R M99 BaseWare OS 3 2 ...
Page 80: ...Product Specification RobotWare 2 Product Specification RobotWare for BaseWare OS 3 2 ...
Page 82: ...Introduction 4 Product Specification RobotWare for BaseWare OS 3 2 ...
Page 104: ...Interbus S 3 2 26 Product Specification RobotWare for BaseWare OS 3 2 ...
Page 110: ...I O Plus 3 2 32 Product Specification RobotWare for BaseWare OS 3 2 ...
Page 128: ...PalletWare 50 Product Specification RobotWare for BaseWare OS 3 2 ...
Page 132: ...Safety 2 Product Manual ...
Page 148: ...System Description CONTENTS Page 2 Product Manual ...
Page 158: ...Structure System Description 12 Product Manual ...
Page 160: ...Computer System System Description 14 Product Manual ...
Page 164: ...I O System System Description 18 Product Manual ...
Page 168: ...Safety System System Description 22 Product Manual ...
Page 170: ...External Axes System Description 24 Product Manual ...
Page 174: ...Installation and Commissioning CONTENTS Page 4 Product Manual IRB 6400R ...
Page 196: ...On Site Installation Installation and Commissioning 26 Product Manual IRB 6400R ...
Page 270: ...Installing the Control Program Installation and Commissioning 100 Product Manual IRB 6400R ...
Page 292: ...Maintenance CONTENTS Page 2 Product Manual IRB 6400R ...
Page 299: ...Maintenance Product Manual IRB 6400R 9 Figure 4 Lubricating gearbox axis 1 4 3 1 2 ...
Page 312: ...Troubleshooting Tools CONTENTS Page 2 Product Manual ...
Page 350: ...Troubleshooting Tools 40 Product Manual ...
Page 352: ...Fault tracing guide 2 Product Manual ...
Page 362: ...Fault tracing guide 12 Product Manual ...
Page 375: ...Motor units Repairs 12 Product Manual IRB 6400R ...
Page 401: ...Arm System Repairs 38 Product Manual IRB 6400R ...
Page 409: ...Cabling Repairs 46 Product Manual IRB 6400R ...
Page 441: ...Special Tools List Repairs 80 Product Manual IRB 6400R ...
Page 479: ...Part List and Spare Parts Product Manual IRB 6400R 38 ...
Page 480: ...Part List and Spare Parts Product Manual IRB 6400R 39 ...
Page 481: ...Part List and Spare Parts Product Manual IRB 6400R 40 ...