





























100
ACS 160 User’s Manual
Group 82: Positioning
Built-in positioning features of the ACS 160 make it possible to use the drive in simple positioning
applications, in many cases without an external PLC. Possible application examples are indexing
systems and positioning systems with two absolute positions. Homing functions are also available.
Operation can be combined with electromechanical brake and with dynamic braking.
Default operation of the Positioning Macro is described in Application Macro section.
Note!
After selecting Positioning Macro by setting parameter 9902
APP
MACRO
= 14 (
POSITIONING
),
the drive must be switched off and then on again. When Positioning Macro is selected the analogue
output AO1 is not operational.
•
To use positioning the ACS 160 must be equipped with an incremental pulse encoder. Parame-
ters 8201 -8204 are used to configure it. See Table 5 for encoder specifications.
•
Positioning mode is selected using parameter 8215
POS
MODE
. In positioning mode the drive
must be controlled from external control location EXT2 (starting from SW revision 1.0.0.F).
•
Tuning parameters 8218
SLOPE
GAIN
1, 8220
SPEED
GAIN
1 and 8229
DELTA
DISTANCE
are used to
optimise the operation when approaching the target position.
•
Parameter 8216
HOMING
MODE
tells how the system should find its initial position when power is
turned on. In the simplest systems homing is not needed.
•
There are two position reference sets. Both include target position and separate speed profiles.
The position reference selection mechanism is configured using parameter 8206
POS
TABLE
SEL
.
•
Two ACS160 parameter locations are needed per position: Most significant part of a position is
given as full revolutions of the axis, and least significant part is given as multiples of 1/65536 of
one axis revolution.
Example
Target 1 is at the distance of 52 full axis revolutions plus one quarter of a revolution. In this case,
target is stored as:
Parameter 8207
TARGET
1
LO
= 1/4 * 65536 = 16384
Parameter 8208
TARGET
1
HI
= 52
Note!
Due to four segment panel display, the displayed value needs to be multiplied by 10, when the
parameter values goes over 9999.
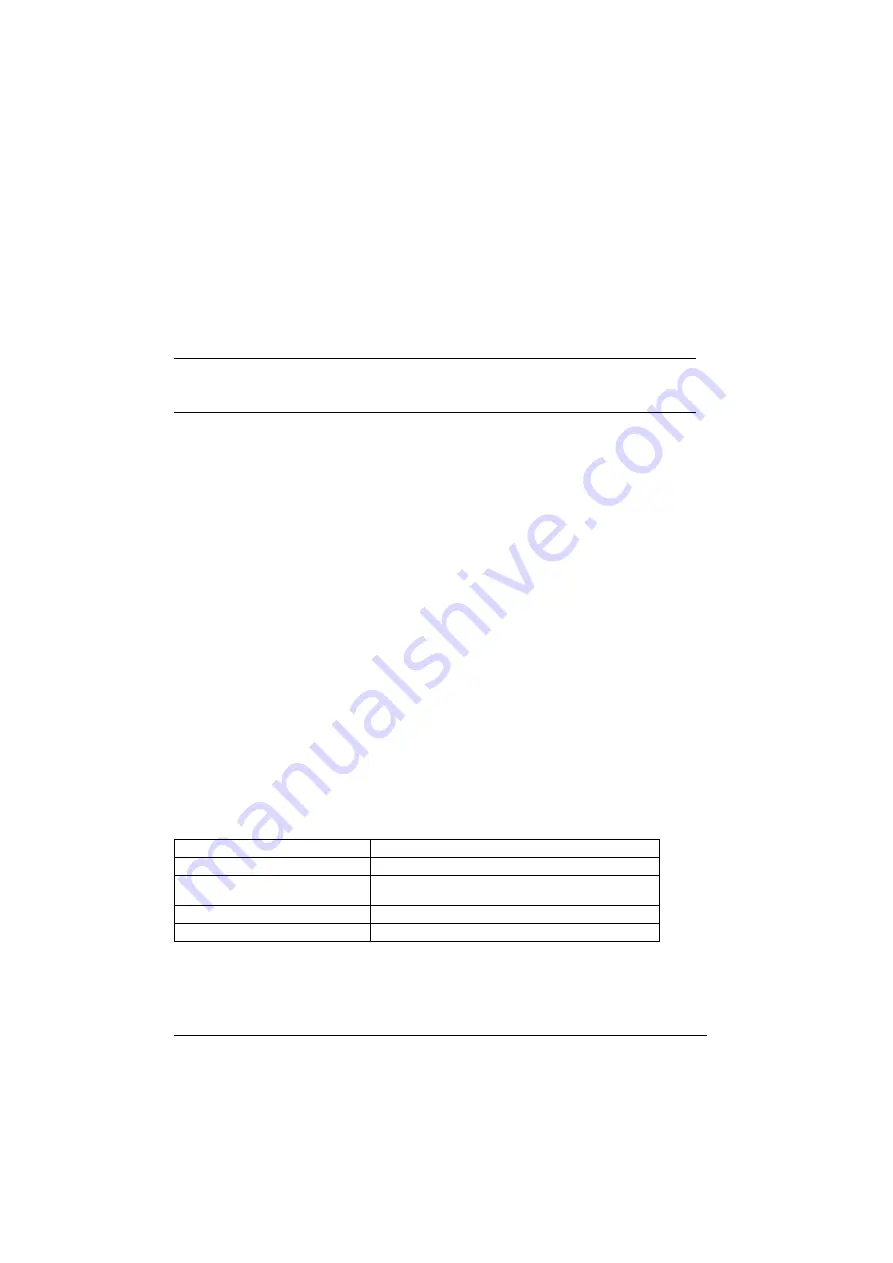
Table 5 Encoder specifications
For further information please contact your local ABB supplier.
Supply voltage
24 V from terminals X1:9 (+24 V) and X1:8 (GND)
Max. current consumption
100 mA
Encoder outputs
Connected to terminals X1:14 (DI4) and X1:15 (DI5). Signal
leads with opposite phase are not used
Max. encoder cable length
3 m
Max. pulse frequency
200 kHz
Summary of Contents for ACS 160
Page 2: ......
Page 4: ......
Page 10: ...viii ACS 160 User s Manual ...
Page 12: ...2 ACS 160 User s Manual ...
Page 32: ...22 ACS 160 User s Manual ...
Page 42: ...32 ACS 160 User s Manual ...
Page 56: ...46 ACS 160 User s Manual ...
Page 116: ...106 ACS 160 User s Manual ...
Page 122: ...112 ACS 160 User s Manual ...
Page 126: ...116 ACS 160 User s Manual ...
Page 136: ...126 ACS 160 User s Manual ...
Page 137: ......







































































