




















TMC-4 Control Card
for Electric Actuators
Installation & Maintenance Manual
18
04/06/22
www.atcontrols.com
IOM08139 REVISION 04
4.1.2. Position Limit Switch (P5)
Position limit switches connected to header (P5) are used to detect the Open
and Close position of the actuator for two position and on/off applications.
These switches will stop the actuator at the limits and provide Open or Close
status indication to the TMC4 when “Position Type” is set for Limit Switch in
POSITION CONFIG
submenu.
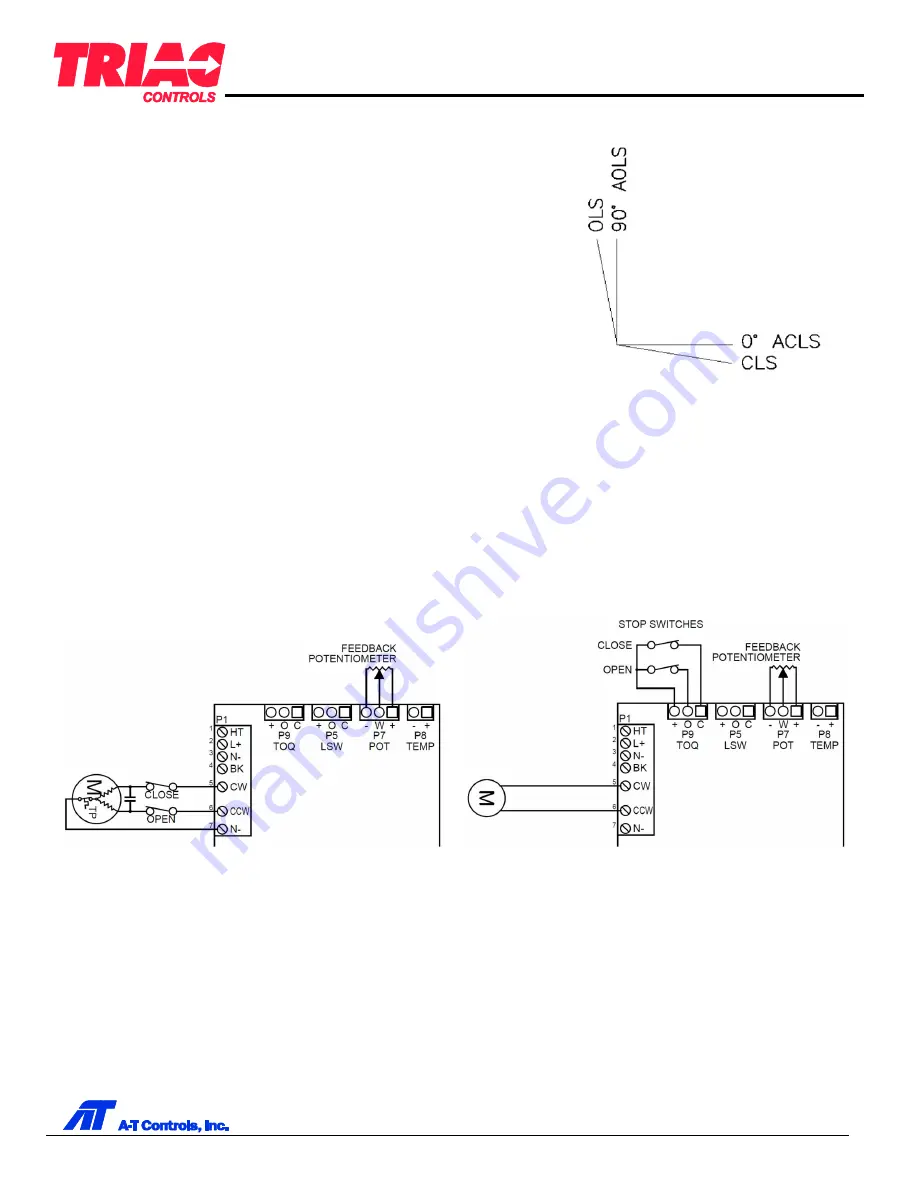
Typically, the auxiliary switches (AOLS and ACLS) in an actuator would be
used, and the motor travel stop switches (OLS and CLS) would be set just
outside of the operating range. The “Switch Action” setting in the
POSITION
CONFIG
submenu must be set according to if using normally open contact
(N.O. switch action) or a normally closed contact (N.C. switch action).
4.1.3. Stop/Torque Limit Switch (P9)
Motor travel stop or torque switches connected to header (P9) are used to stop the actuator regardless of set position
limits. This switch input should be used when the TMC4 motor outputs are not wired through limit switches, such as for
DC motors. This switch input provides no position indicator for the TMC4 since if an in-line switch stopped the motor from
some over torque situation, a false Open or Close status may be given.
When the motor outputs are wired through limit or torque switches, the switches should be connected through the N.C.
contact to open the motor circuit when activated. As such, the switches connected to the Stop/Torque input (P9) should
preferably also use a N.C. contact configuration. Ensure “Switch Action” setting in the
POSITION CONFIG
submenu is set
for N.C. action for the stop/torque switches.
AC
DC
Motor outputs connected to motor through switches.
Stop/Torque switch input not required.
Motor outputs connected directly to motor.
Stop/Torque switch input required.







































































