





























5.2 b: Application
YASKAWA ELECTRIC
SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual
139
P
a
ra
me
te
r D
e
ta
ils
5
u
b9: Zero Servo
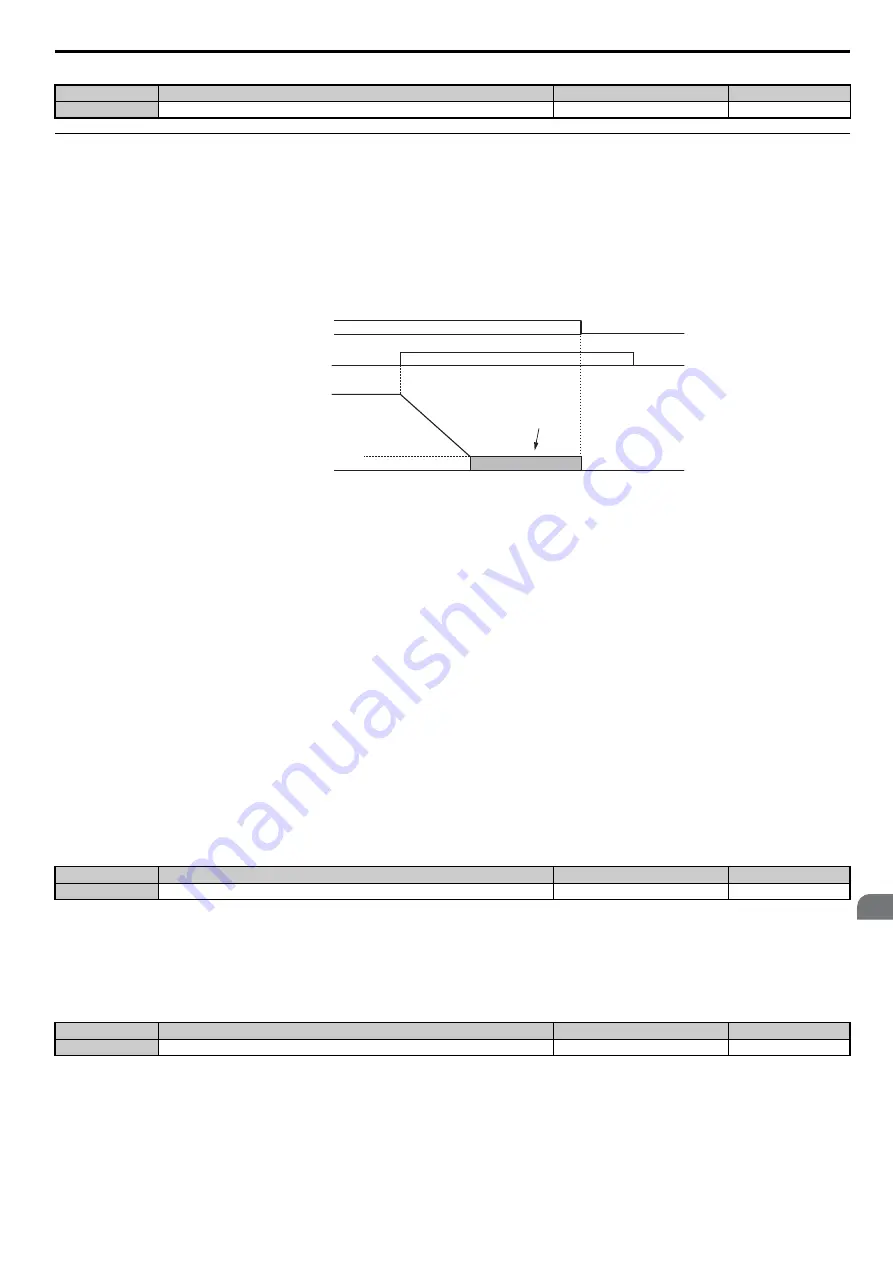
The Zero Servo function is a position loop that can be used in CLV and CLV/PM control modes to lock the motor at a
certain position.
It must be activated using a digital input set for H1-
= 72. The drive will decelerate when this input is closed. Once
the motor speed falls below the level set in parameter b2-01, the drive goes into the Zero Servo mode and holds the
current position. When the input assigned to trigger the Zero Servo function is released and the Run command is still
present, the drive reaccelerates.
Figure 5.26
Figure 5.26 Zero Servo Operation
When Zero Servo is active, the deviation between the rotor position and the zero position is displayed in monitor U6-22
(monitor value must be divided by 4 to get the deviation in actual encoder pulses).
A digital output programmed for “Zero Servo complete” (H2-
= 72) is turned on when the rotor position is within the
zero position, plus or minus the Zero Servo completion width set in parameter b9-02.
Note: 1.
The Run command must remain on when using the Zero Servo function. If the Run command is switched off, then Zero Servo will no
longer be able to hold the load in place.
2.
When the Zero Servo command has shut off, the Zero Servo Completion digital output width also shuts off.
3.
Avoid using Zero Servo to lock 100% load for long periods, as this can trigger a fault. If such loads need to be held in place for long
periods, either make sure the current is less than 50% of the drive rated current during Zero Servo, or use a larger capacity drive.
4.
If the load rotates the motor when using CLV/PM, a dv4 fault may occur. To prevent this, either increase the Zero Servo gain (b9-01)
or increase the number of pulses set to F1-19 that are required to trigger dv4.
n
b9-01: Zero Servo Gain
Parameter b9-01 adjusts the responsiveness of the Zero Servo position loop. Increase the value if the response is too slow
and the deviation from the zero position rises too high when load is applied. Decrease the value if vibrations occur during
Zero Servo operation.
Note:
Before adjusting the Zero Servo gain, make sure the ASR parameters (C5-
) are set up properly and vibration or hunting does
not occur when running with a zero speed reference.
n
b9-02: Zero Servo Completion Width
Sets the output range of the Zero Servo completion signal. Enter the amount of allowable deviation from the desired
position to trigger Zero Servo. An output terminal set for Zero Servo (H2-
= 33) will be triggered when the motor
reaches the position Zero Servo position plus or minus b9-02.
No.
Name
Setting Range
Default
b8-17
Energy Saving Parameter (Kt) for PM Motors
0.00 to 2.00
1.00
No.
Name
Setting Range
Default
b9-01
Zero Servo Gain
0 to 100
5
No.
Name
Setting Range
Default
b9-02
Zero Servo Completion Width
0 to 16383
10
ON
ON
OFF
OFF
Run command
Zero Servo command
Motor Speed
Zero Servo
Operation
b2-01
DC Injection Braking
start frequency
Содержание T1000A
Страница 4: ...4 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual...
Страница 32: ...1 5 Component Names 32 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual...
Страница 104: ...4 10 Test Run Checklist 104 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual...
Страница 334: ...7 5 Drive Replacement 334 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual...
Страница 362: ...A 6 Drive Derating Data 362 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual...