





























6-6
183523-1CD
183523-1CD
6
Maintenance and Troubleshooting
6.3 Grease Replenishment/Exchange for Speed Reducers
RM2-755-RDR Postioner
6.3.2 Tailstock Lubrication
The lubrication of the swingarm main axis bearing and the motomount
axis bearing are required to be lubricated monthly.
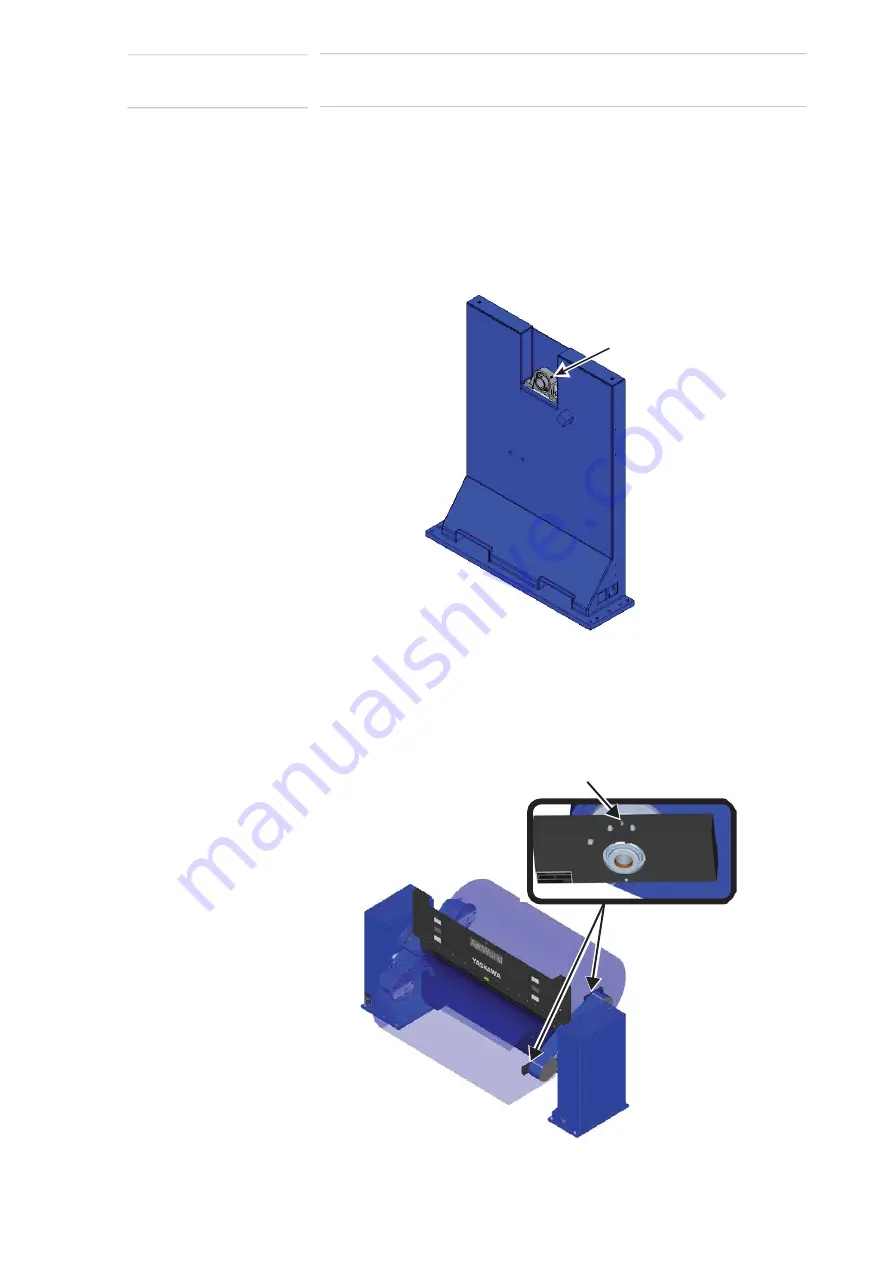
6.3.2.1 Swingarm Main Swing Axis
Apply Mobil CM-P grease to the grease fitting by using a standard grease
gun and pressing the lever 10 times (1.25 g x 10).
Fig. 6
-
3: Tailstock Main Axis Grease Fitting
6.3.2.2 Motomount Lubrication (If equipped)
Apply Mobil CM-P grease to each of grease fitting by squeezing the
grease gun lever five times (approximately 5 @ 1.25 g each).
See
for location of motomount grease fitting.
Fig. 6
-
4: Motomount Grease Fittings
TAILSTOCK SWINGARM
MAIN AXIS GREASE FITTING
GREASE FITTINGS
MOTOMOUNT
TAILSTOCK
50 of 104























































