



























Parts lists
11
-
77
11 Parts lists
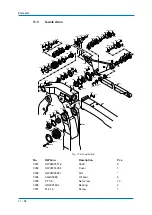
11.1
S-axis drive
Fig. 11-1: S-axis drive
No.
DWG no.
Description
Pcs
1001
SGMRV-44ANA-YR1*
Motor
1
1002
HW0281280-A
Gear box
1
1005
1006
1028
1029
1031
1032
1039
1001
1002
1078
1011
1012
1013
1079
1077
1021
1022
1023
1024
1025
1037
1038
1040
1017
1014
1015
1003
1004
1035
1030
1033
1026
1058
1059
1060
1061
1058
1062
1061
1059
1063
1048
1049
1050
1048
1051
1052
1053
1044
1045
1041
1042
1043
1066
1046
1047
1054
1055
1056
1057
1064
1065
1067
1069
1070
1072
1071
1080
1082
1081
1068
1076
1075
1036
1027
1019
1020
1034
Содержание MPL300-J00
Страница 1: ...ROBOTICS MPL300 J00 YR MPL0300 J00 Operating and Maintenance Manual ...
Страница 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2 ...
Страница 91: ...Parts lists 11 91 ...
Страница 92: ...YASKAWA Headquarter ...







































































