




























Maintenance and inspection
9
-
71
9.5
Setting the second home position (check point)
9.5.1
Purpose of position check operation
If the absolute number of rotations detected when the power is switched on does not match
the data stored by the absolute encoder the last time the power was switched off, an error
message is output.
There are two possible causes of this error message:
•
Error in the pulse generating system
•
The robot was moved after the power supply was turned OFF
If the alarm "OUTSIDE THE RANGE (ABSOLUTE DATA)" appears, automatic mode is not
possible. The home position must be checked.
If the "OUT OF RANGE (ABSO DA-
TA)" alarm occurs:
Compare second home position
(check point)* with current position
pulses.
Alarm reset
The alarm occurs again
Switch the servo power on
Correct the faulty axis, replace the
pulse generating system, set the
home position
Procedure after an alarm
* Position checking point
Position confirmation
Automatic mode possible
OK
NOK
1
6
2
7
3
8
4
9
5
10
Содержание MPL300-J00
Страница 1: ...ROBOTICS MPL300 J00 YR MPL0300 J00 Operating and Maintenance Manual ...
Страница 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2 ...
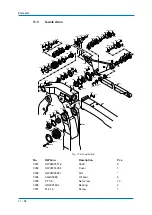
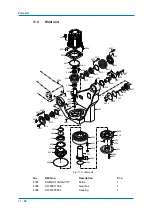
Страница 91: ...Parts lists 11 91 ...
Страница 92: ...YASKAWA Headquarter ...







































































