





























Maintenance and inspection
9
-
57
9.4
Home position check
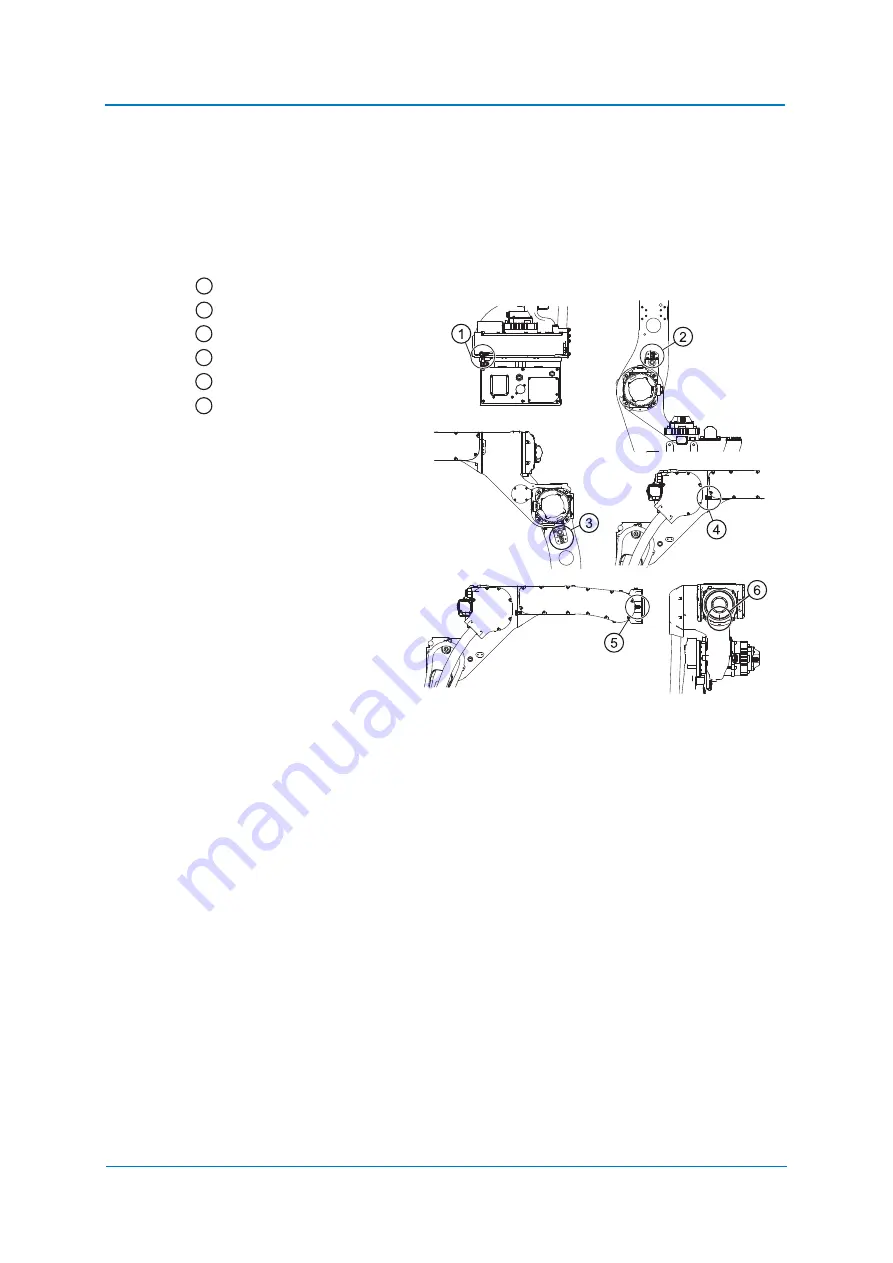
There are alignment marks on each axis to check the home position (Refer to figure
“Alignment mark check” below). With those alignment marks, check for home position
deviation on regular basis.
When home position is disappeared or deviated, contact YASKAWA representative.
Alignment mark check
S-axis alignment mark
L-axis alignment mark
U-axis alignment mark
R-axis alignment mark
B-axis alignment mark
T-axis alignment mark
1
2
3
4
5
6
Содержание GP25-12
Страница 1: ...ROBOTICS YYR 1 06VXH25 A10 GP25 12 Standard Operating and Maintenance Manual...
Страница 51: ...Maintenance and inspection 9 51 Fig 9 2 Inspection intervals...
Страница 56: ...Maintenance and inspection 9 56 9 3 Wrist unit Sealing part U arm Cover Gasket U arm 1 2 3...
Страница 77: ...Parts lists 11 77...







































































